|
AutoBehave project (2019-2023), coordinated by Carlos Crispim, is a partnership among LAET, LESCOT, LBMC, and LIRIS laboratories. Its goal is to investigate the behaviors of passengers of autonomous vehicles during daily trajects using a multi-sensor approach. This project is funded by the grant "Pack Ambition Recherche 2019" from the region Rhône Alpes in France. |
|
| Keywords: | driver posture analysis, cognitive state analysis, value of time, autonomous vehicles |
|
Contact details: |
Carlos Crispim-Junior
Université Lumière - Lyon 2 Bât C - Bureau C121 5 avenue Pierre Mendès-France 69676 Bron cedex |
Consortium
| Name | Affiliation | Role |
|---|---|---|
| Carlos CRISPIM-JUNIOR | LIRIS / Université Lyon 2 | Principal investigator |
| Laure TOUGNE-RODET | LIRIS / Université Lyon 2 | Researcher |
| Romain GUESDON | LIRIS / Université Lyon 2 | PhD student |
| Xuguang WANG | LBMC / Université Gustave-Eiffel | Researcher |
| Georges BEURIER | LBMC / Université Gustave-Eiffel | Researcher |
| Christophe JALLAIS | LESCOT / Université Gustave-Eiffel | Researcher |
| Fabien Vincent | LESCOT / Université Gustave-Eiffel | Engineer |
| Stephanie SOUCHE-LE CORVEC | LAET / Université Lyon 2 | Researcher |
| Florent LAROCHE | LAET / Université Lyon 2 | Researcher |
Publications
| Bibliographic references | Ressources | |
|---|---|---|
|
Romain Guesdon, Carlos Crispim-Junior, Laure Tougne. DriPE: A Dataset for Human Pose Estimation in Real-World Driving Settings. 2nd Autonomous Vehicle Vision (AVVision) - International Conference on Computer Vision (ICCV) Workshop, Oct 2021, Virtual Conference, France. |
|
 |
|
Romain Guesdon, Carlos Crispim-Junior, Laure Tougne. Multitask Metamodel for Keypoint Visibility Prediction in Human Pose Estimation. International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISAPP), Feb 2022, Virtual Conference, France. |
|
|
|
Romain Guesdon, Carlos Crispim-Junior, Laure Tougne. Synthetic Driver Image Generation for Human Pose-Related Tasks. International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISAPP), Feb 2023, Lisbon, Portugal. |
|
|
Stéphanie Souche-Le Corvec, Florent Laroche, and Carlos. F. Crispim-Junior. Dream and Reality for Autonomous Vehicles: Results and Lessons from an In Situ Experiment. Transportation Research Record: Journal of the Transportation Research Board, 2023, doi: https://doi.org/10.1177/03611981231155905. |
|
|
Carlos Fernando Crispim-Junior, Romain Guesdon, Christophe Jallais, Florent Laroche, Stephanie Souche-Le Corvec, Laure Tougne Rodet AutoExp: A Multidisciplinary, Multi-Sensor Framework to Evaluate Human Activities in Self-Driving Cars. 26th IEEE International Conference on Intelligent Transportation Systems ITSC, 2023, Bilbao, Bizkaia, Spain. |
|
|
|
Carlos F. Crispim-Junior, Romain Guesdon, Christophe Jallais, Georges Beurier, Xuguang Wang, Florent Laroche, Stephanie Souche-Le Corvec,Laure Tougne Rodet A glimpse at the first results of the AutoBehave project: a multidisciplinary approach to evaluate the usage of our travel time in self-driving cars. BRAVO (roBustness and Reliability of Autonomous Vehicles in the Open-world) workshop, International Conference on Computer Vision, 2023, Paris, France. (Abstract) |
To appear | |
Datasets and source-code
| Dataset | Link |
|---|---|
DRIPE - Human pose estimation benchmark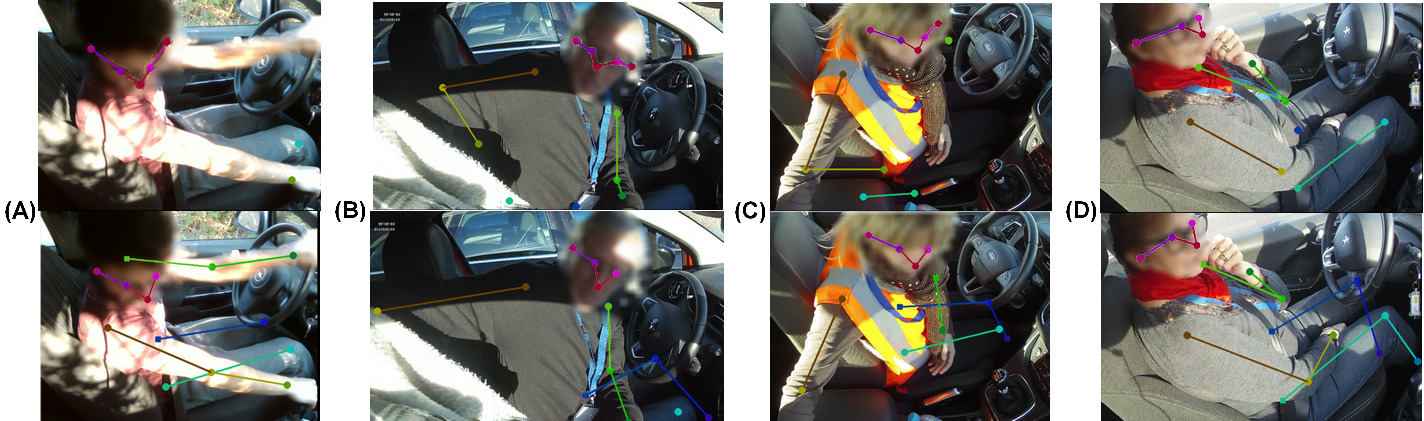
|
|
Synthetic Driver Image Generation for Human Pose-Related Tasks
|
|