Échantillonnage basse discrépance et bruit bleu en informatique graphique

Contexte
Synthèse d'image : simulation transport lumineux
[Kaj86] $$\mathcal{I}(\vx) = L_e(\vx) + \int_\mathcal{H} \rho(\vp, \vx) \mathcal{I}(\vp) d\vp$$

Approximation numérique
Estimateurs de Monte-Carlo
$$\int_D f(x)dx \approx \frac{1}{n} \sum_{i=0}^{n} f(x_i)$$

Estimateurs de Monte-Carlo
$$\int_D f(x)dx \approx \frac{1}{n} \sum_{i=0}^{n} f(x_i)$$

Estimateurs de Monte-Carlo
$$\int_D f(x)dx \approx \frac{1}{n} \sum_{i=0}^{n} f(x_i)$$

Echantillonnage n-D

De nombreuses stratégies
- de construction de chemins (bidirectionnelle, gradient domain...)
- d'échantillonnage (adaptatives, importance sampling, multiple importance sampling...)
- de corrélation de l'échantillonnage d'un pixel à un autre
- de post-filtrage/reconstruction...
- ...
Besoin de processus ponctuels efficaces
Erreur, Biais, Variance
$\mathcal{I} = \int_\Omega fdx$
$\mathcal{I}_n = \frac{1}{n}\sum f(x_i), \quad \{x_i\}\in \Omega$
$$ \Delta := | \mathcal{I} -\mathcal{I}_n | $$
$$ \langle \Delta\rangle := \mathcal{I} - \langle \mathcal{I}_n \rangle $$
$$ \text{Var}(\mathcal{I}_n) := \langle \mathcal{I}_n^2 \rangle - \langle \mathcal{I}_n \rangle^2 $$
Vitesse de convergence



Quatres grandes familles
 [Shi91]
[Shi91]
 [Hal64]
[HH64]
[Sob67]
[Hal64]
[HH64]
[Sob67]
 [Coo96]
[Bri07]
[MF92]
[Coo96]
[Bri07]
[MF92]
 [GBO+12]
[CYK+12]
[Fat11]
[GBO+12]
[CYK+12]
[Fat11]
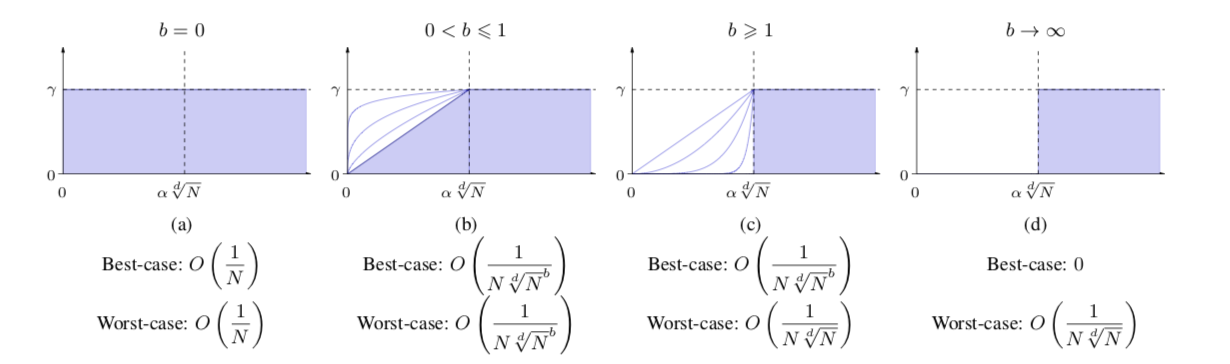
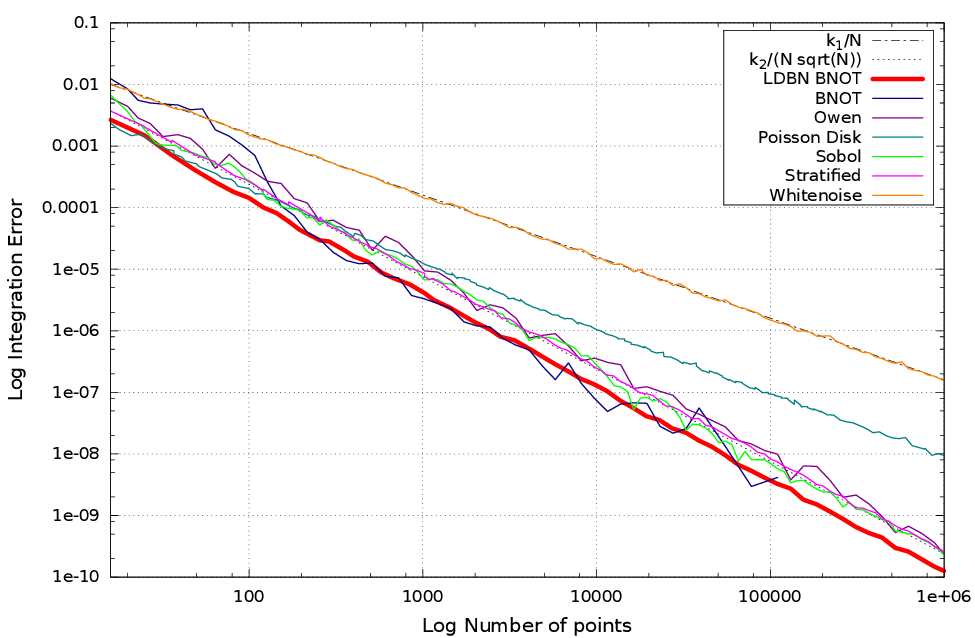
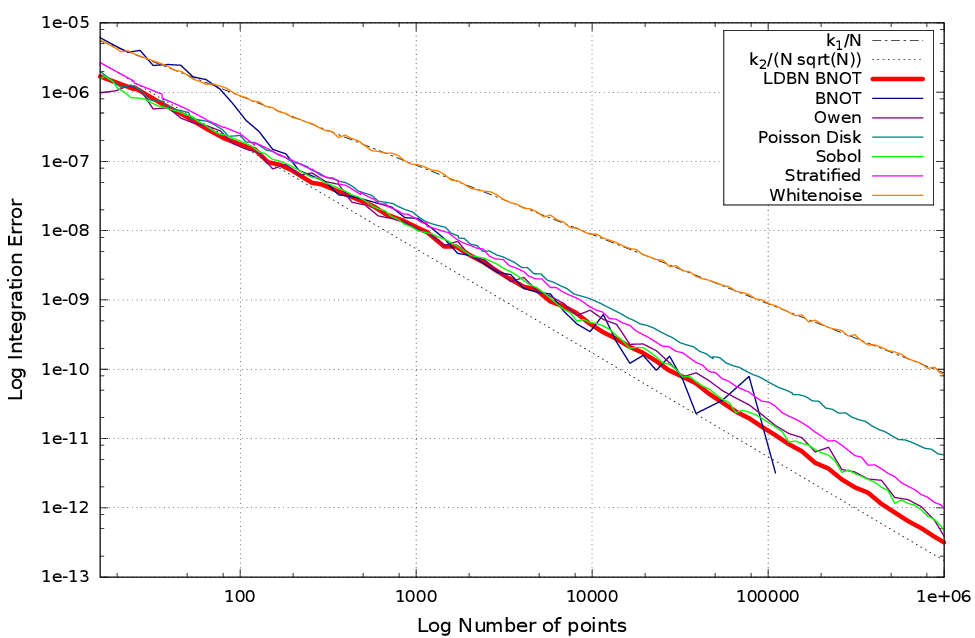
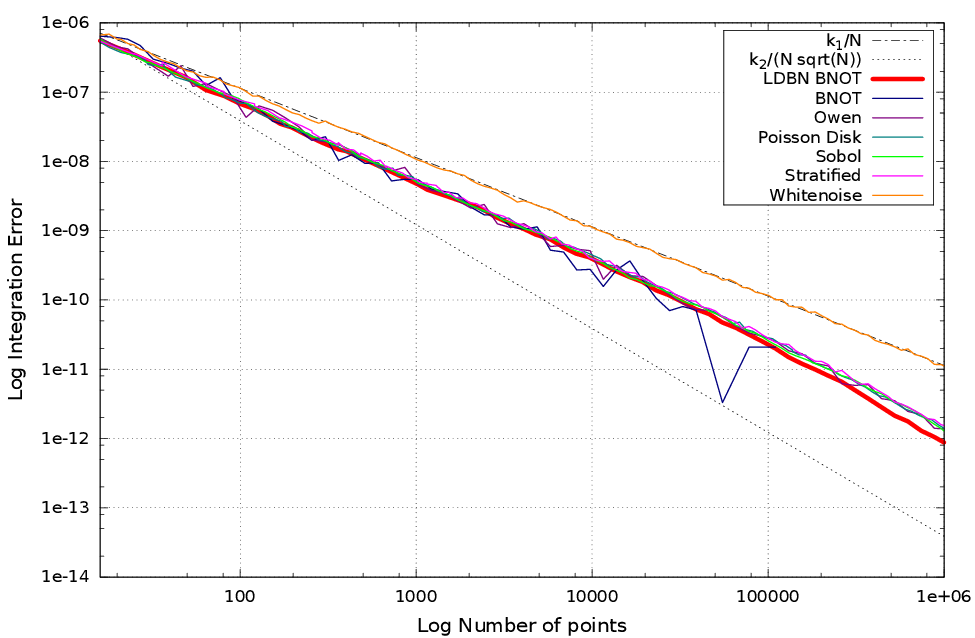
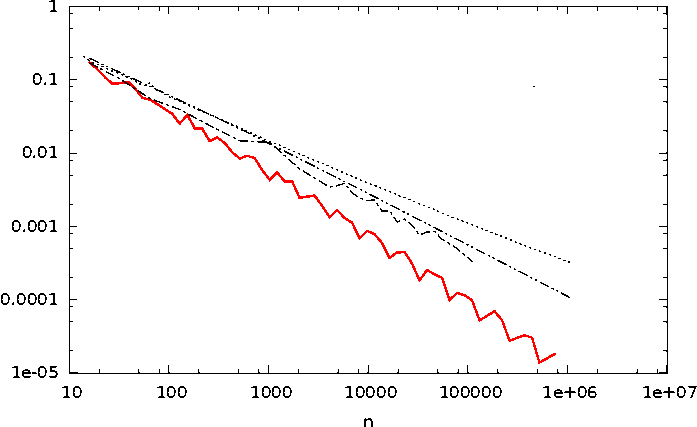
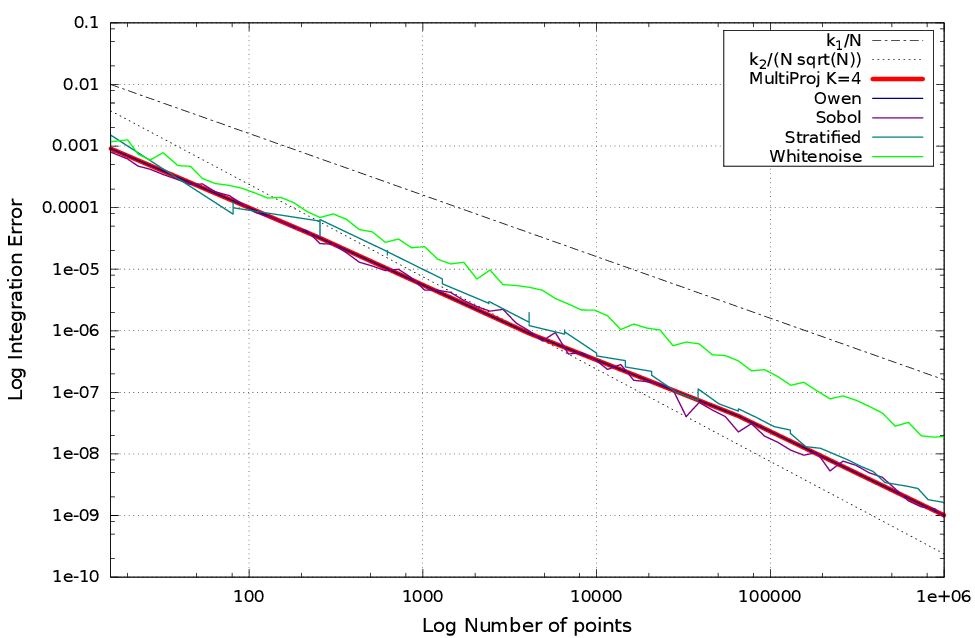
Quelques vitesses de convergence
$$ Var(I_n) = O\left(\frac{\sigma_f^2}{{n}}\right) $$
$$ \Delta = O\left(\frac{ \log(n)^{d-1}}{n}\right) $$
$$ Var(I_n) = O\left(\frac{1}{n\sqrt[d]{n}} \right) $$
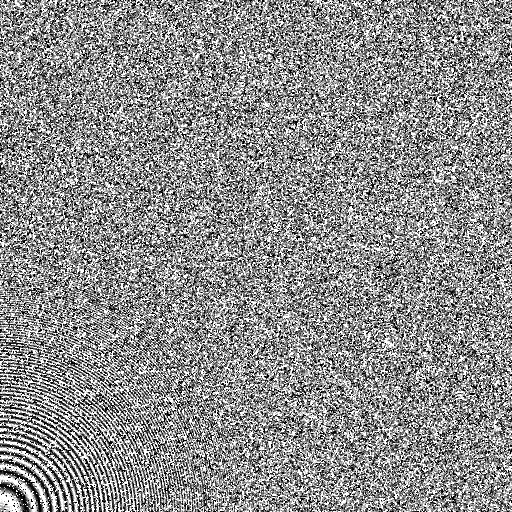
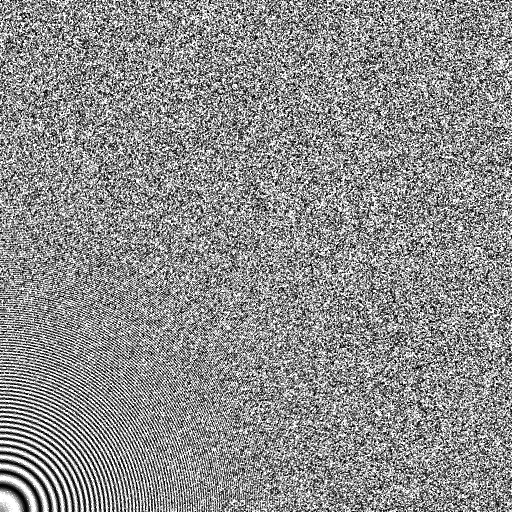
Aliasing et corrélation

Aliasing et corrélation
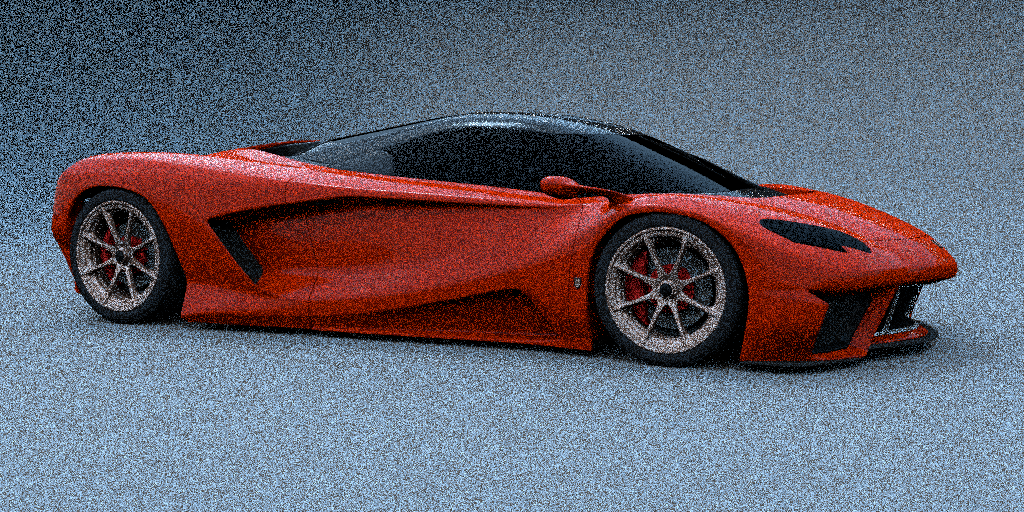
Aliasing et corrélation

Bilan
Processus ponctuels :
- Uniformes dans $[0,1)^d$
- Borne asypmtotique sur l'erreur ou la variance de l'estimateur de MC / QMC
- Très souvent corrélation dans la position des échantillons
Contexte rendu d'images :
- Plutôt faible nombre de dimensions (~30/40)
- Peu de structures (aliasing)
- Faible erreur à peu d'échantillons
- Echantillonneur rapide et progressif
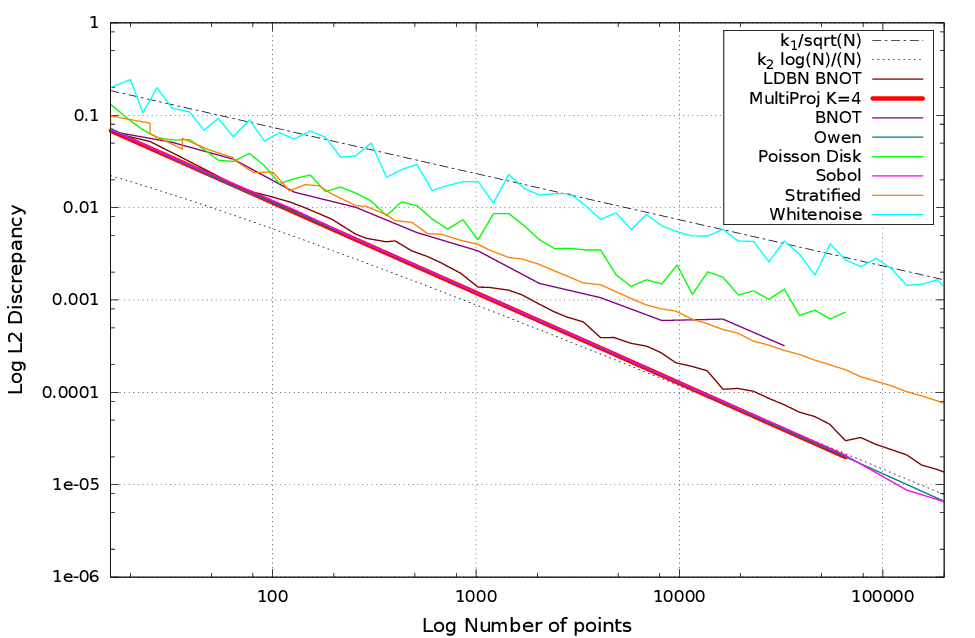
Outils d'évaluation
Discrépance
Mesure d'uniformité d'une distribution de points $P_n$
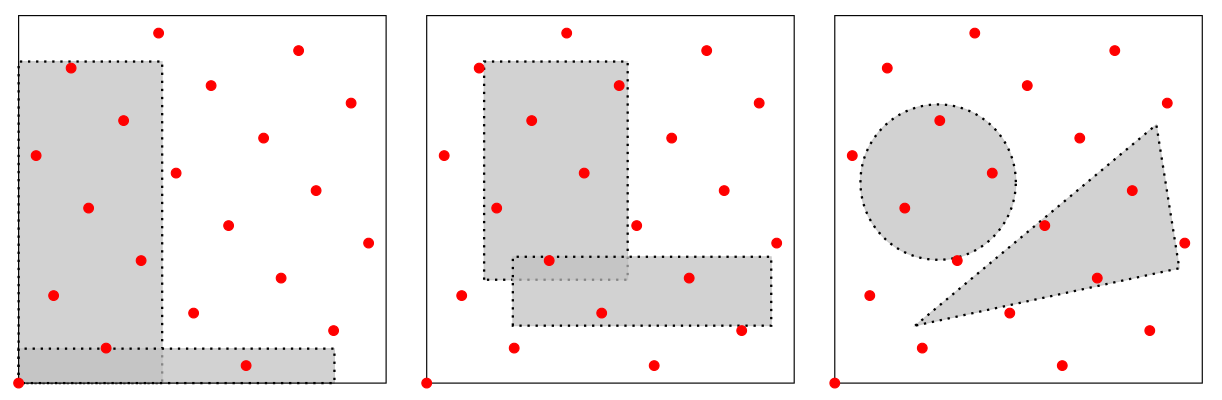
| Star discrepancy |
Extreme discrepancy | Isotropic discrepancy |
$f$ à variation bornée au sens de Hardy & Krause
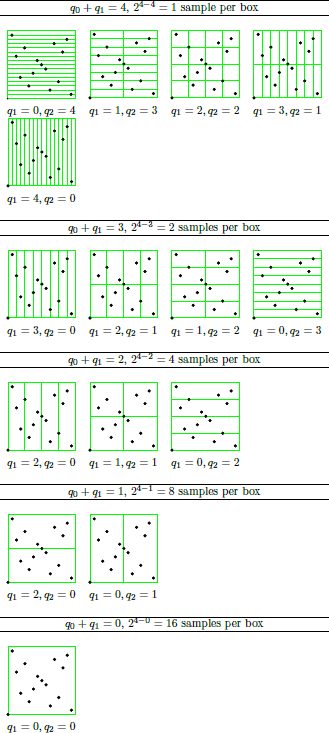
Discrépance
Un échantillonneur est dit basse discrépance si sa discrépance décroit en $O\left(\frac{\log(n)^{d-1}}{n}\right)$.
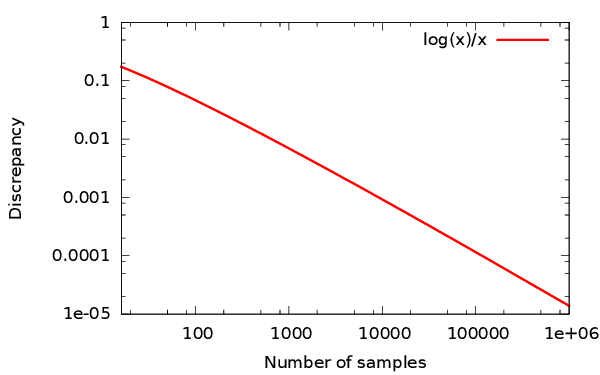
$$ \Delta = O\left(\frac{ \log(n)^{d-1}}{n}\right) $$
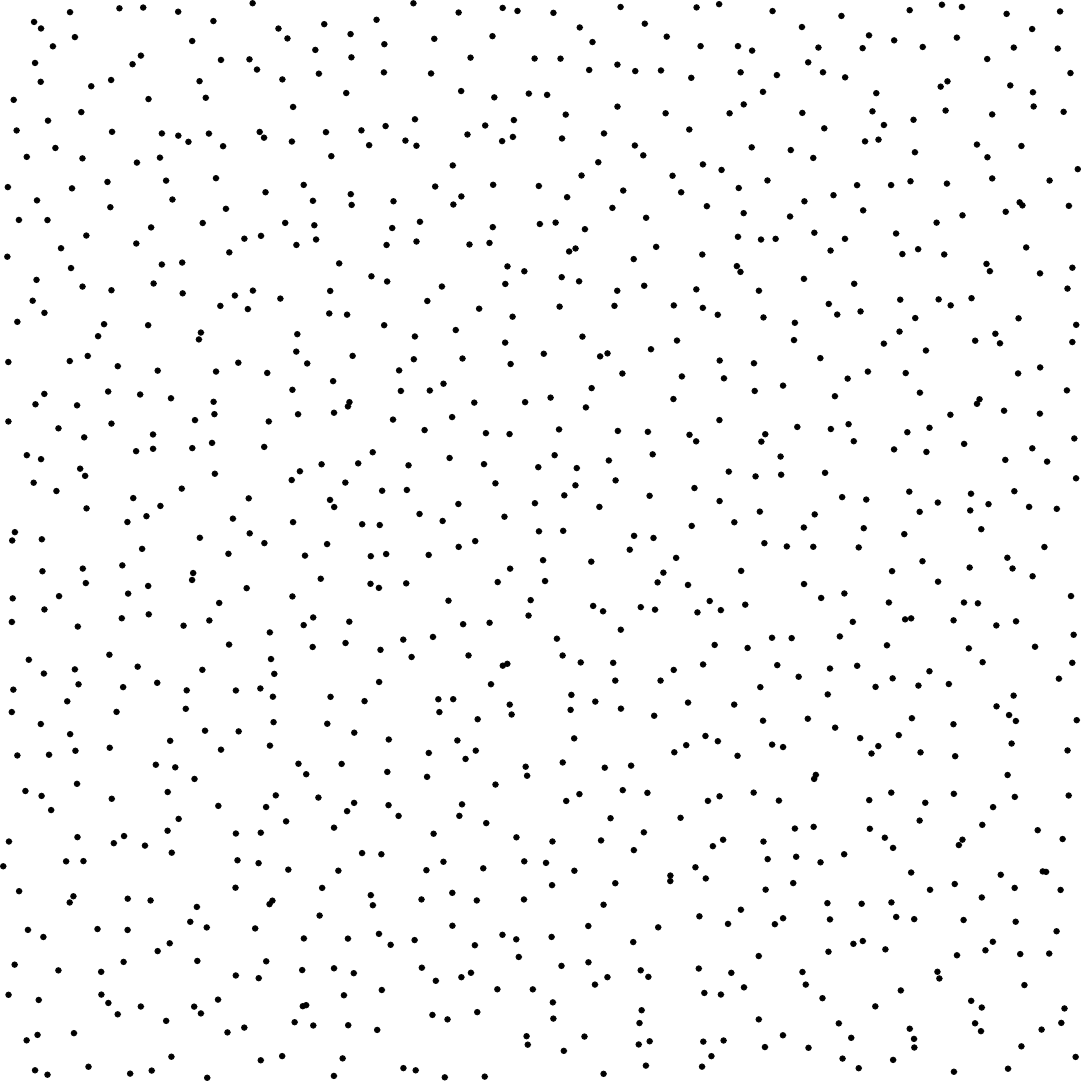
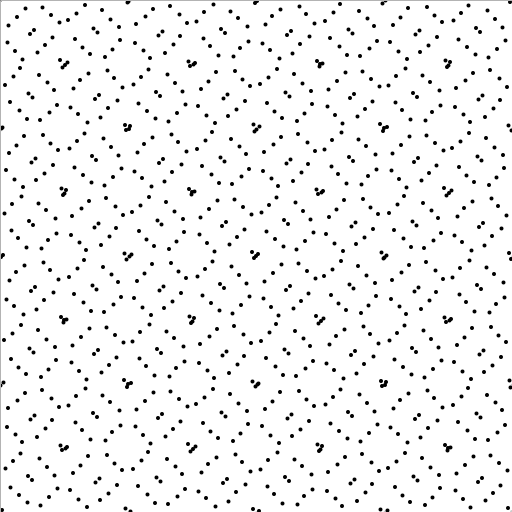
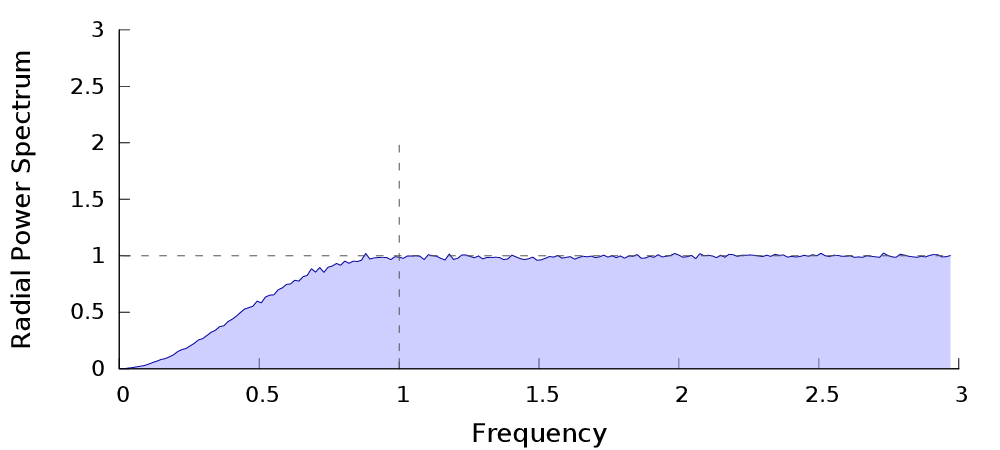
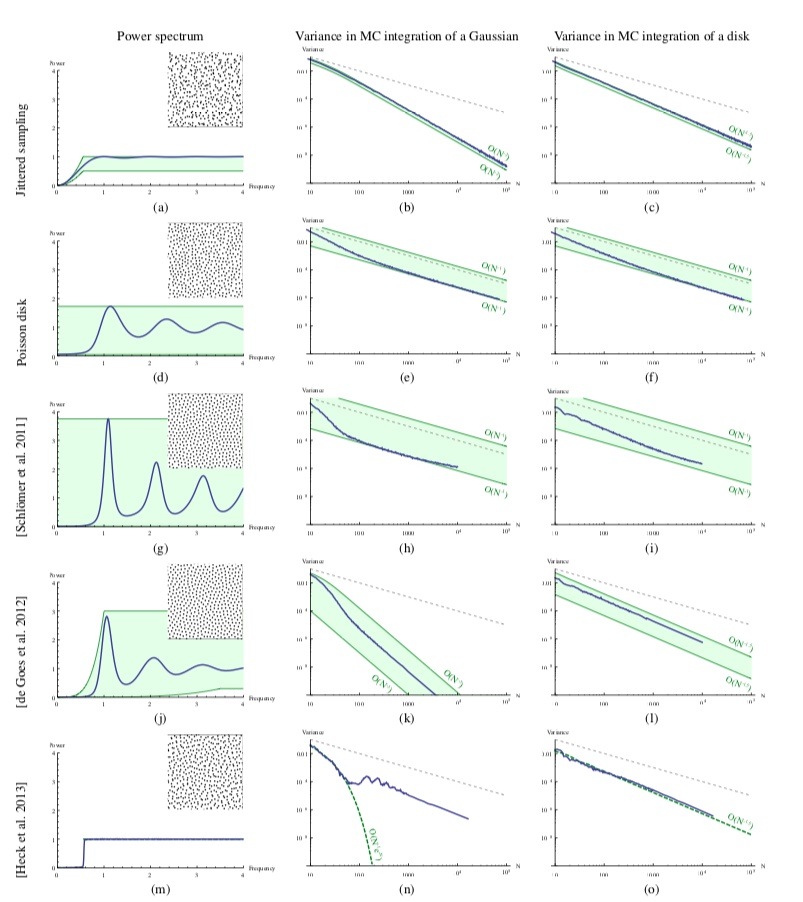
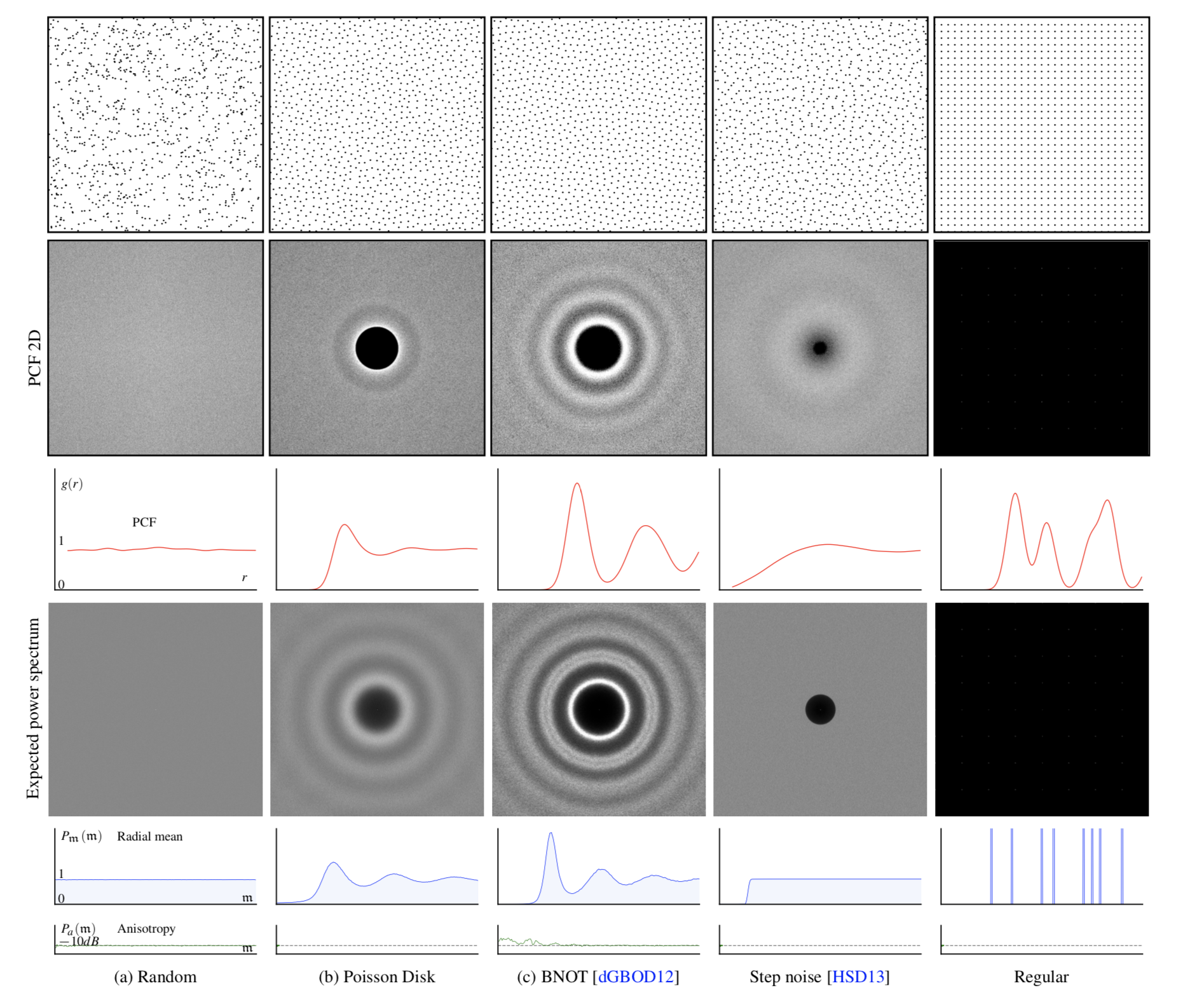
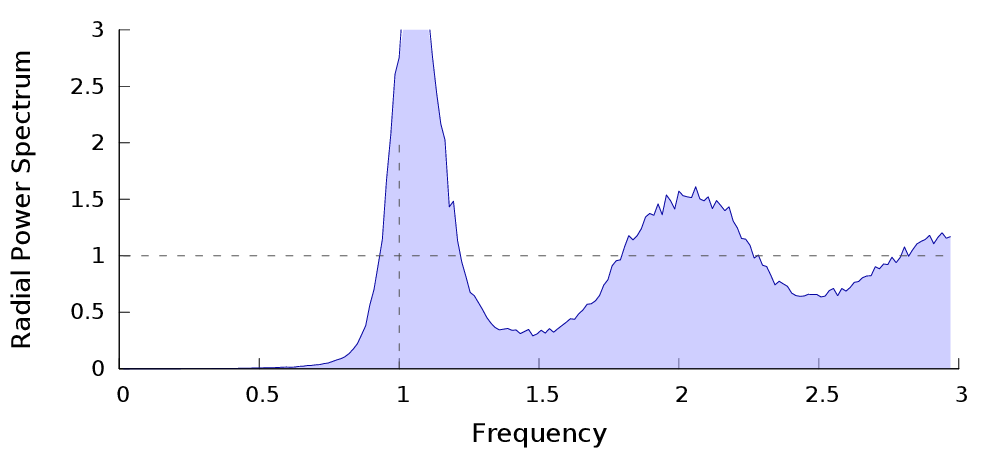
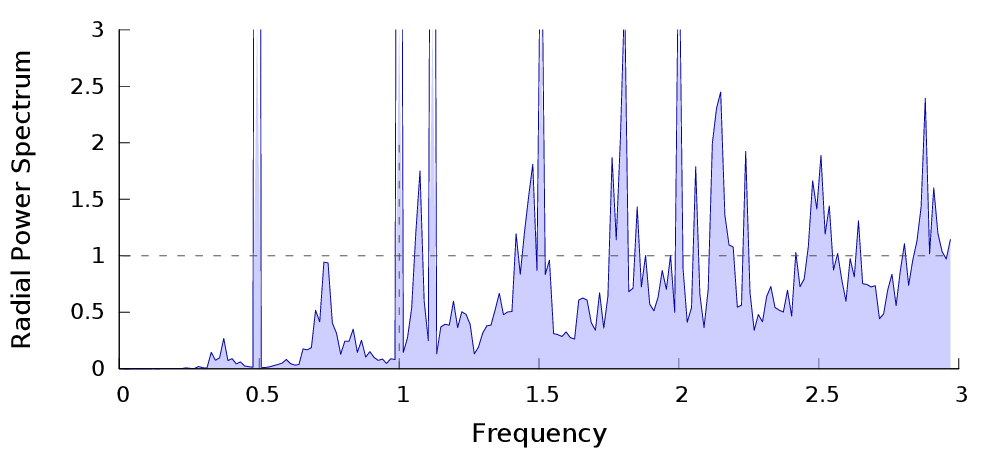
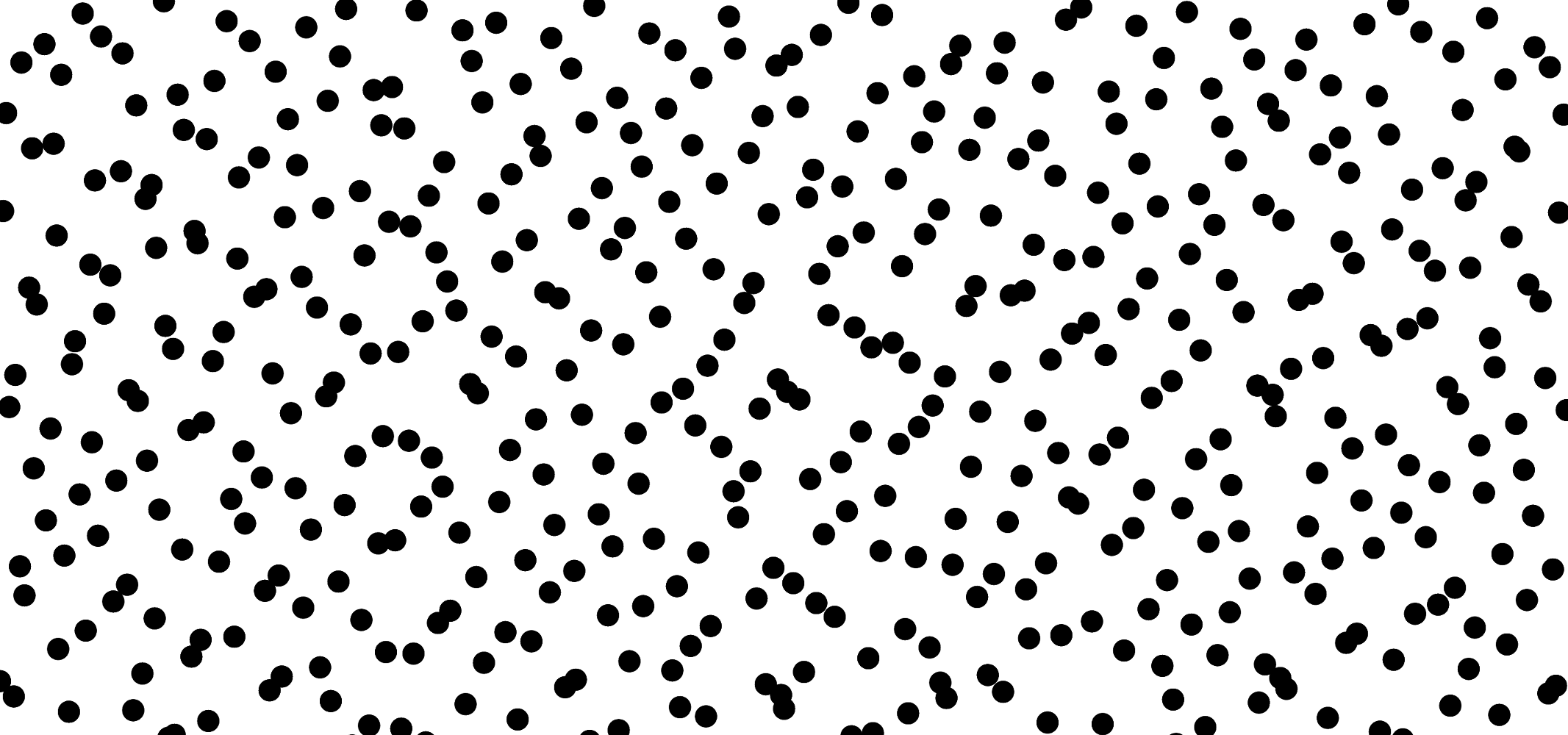
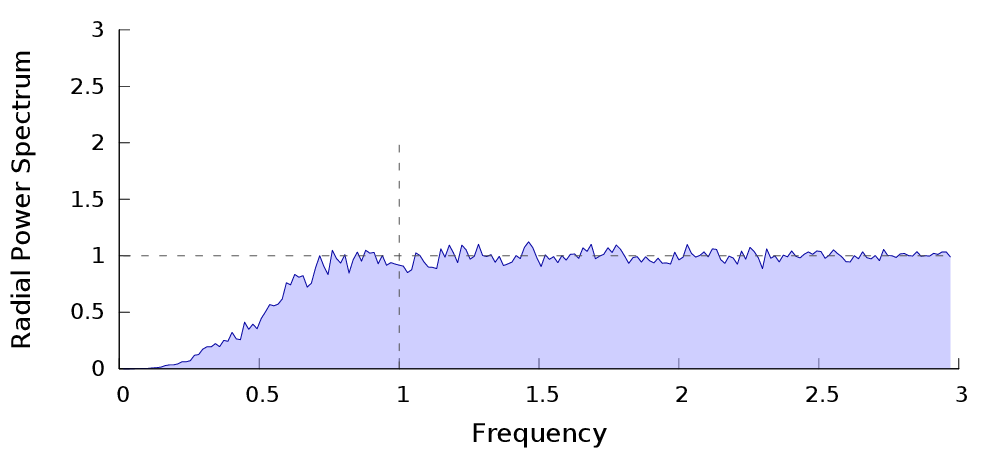
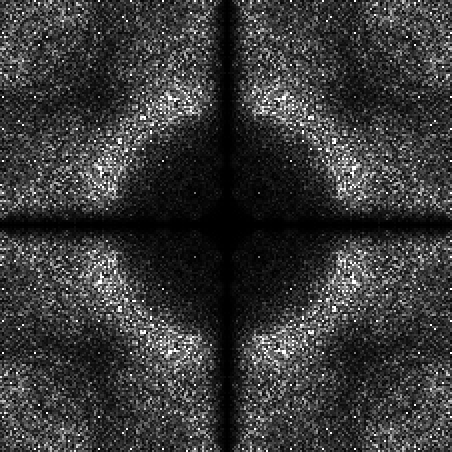
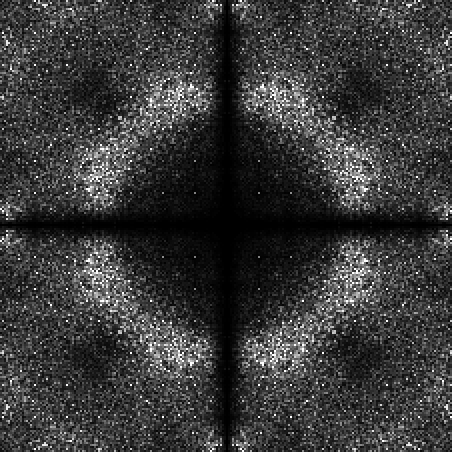
Caractéristiques fréquentielles
| $P_n$ | Spectre de puissance | Radial |
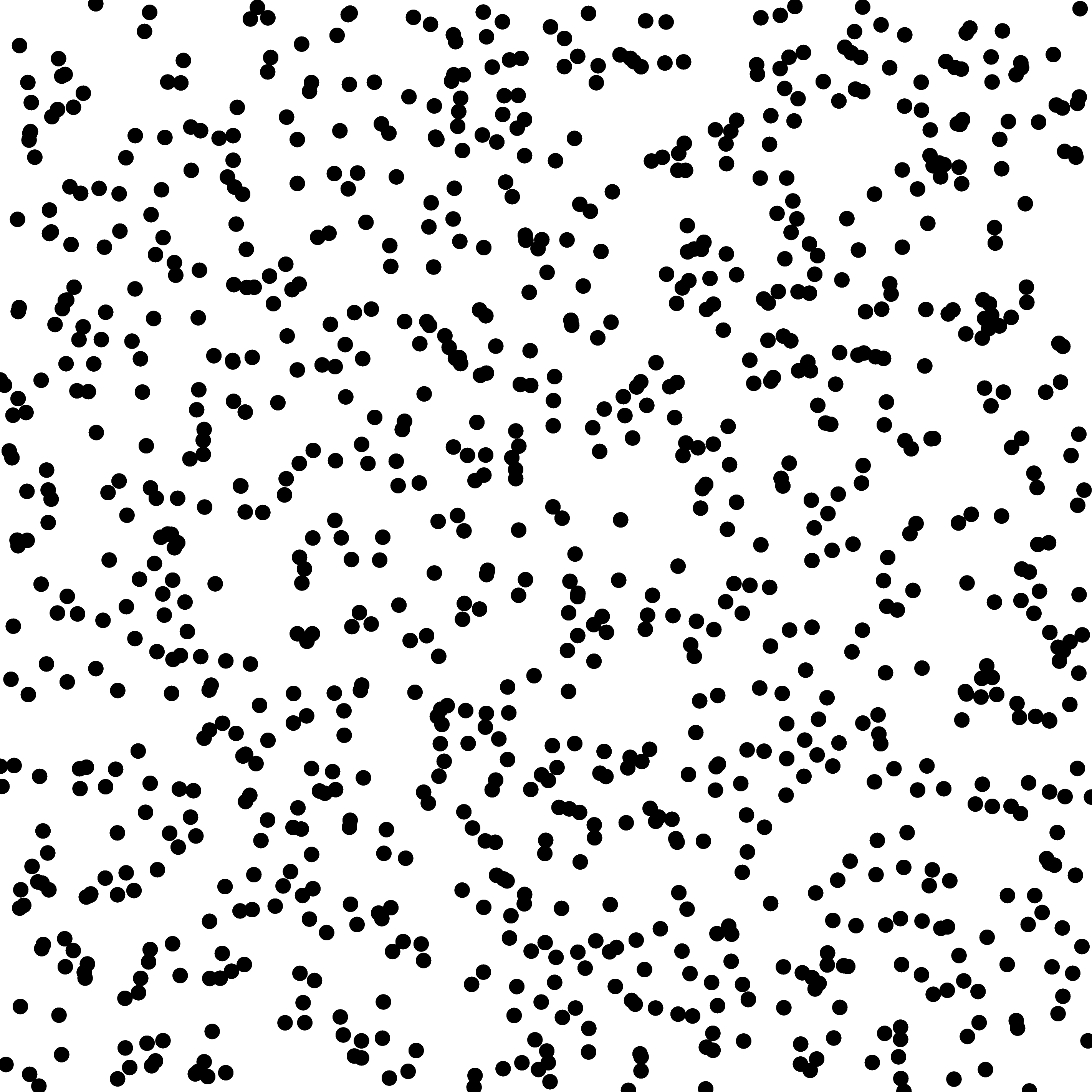

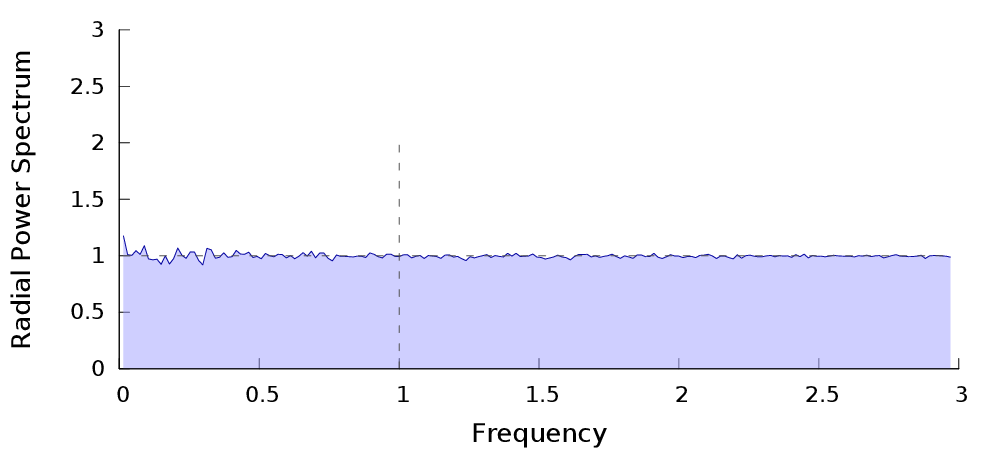
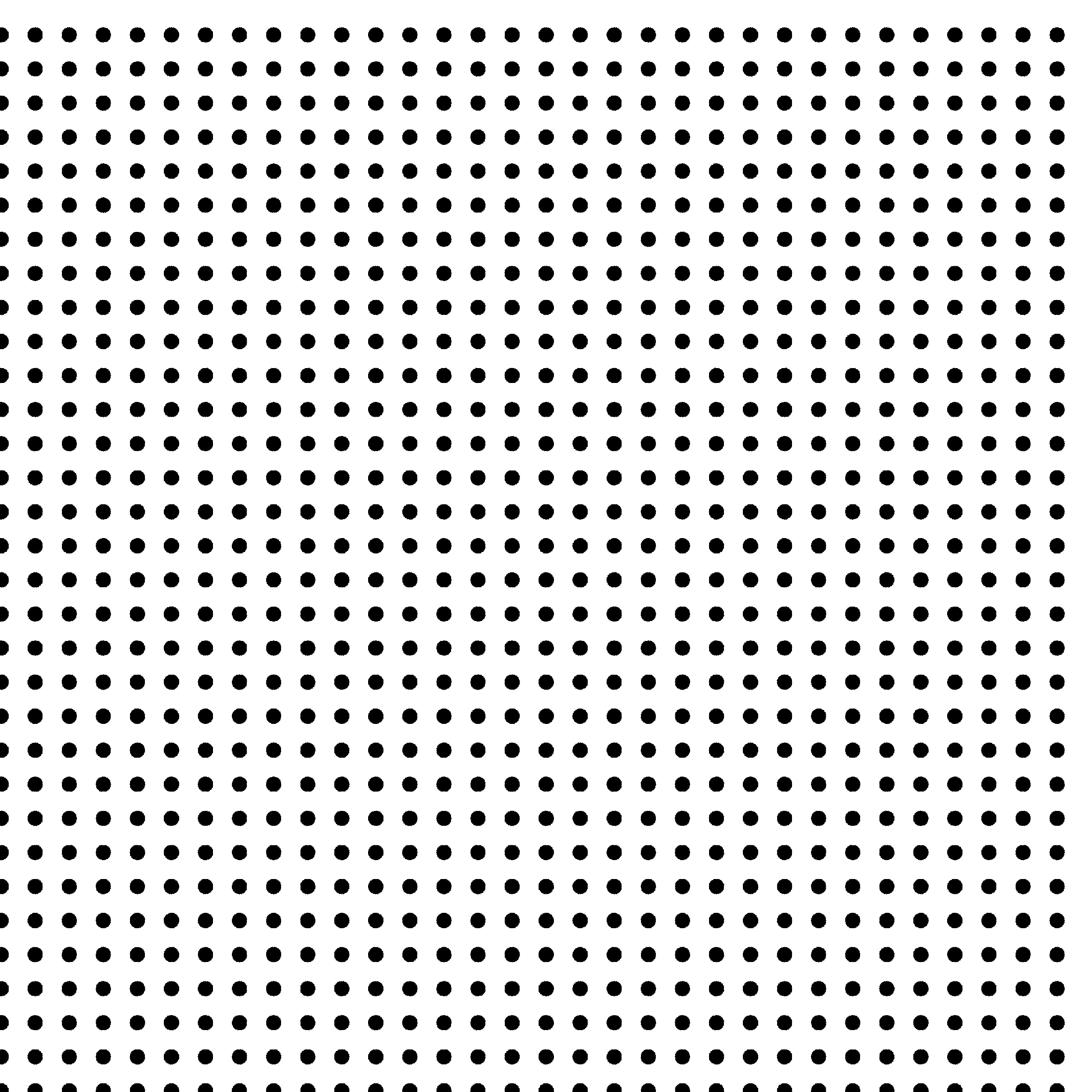

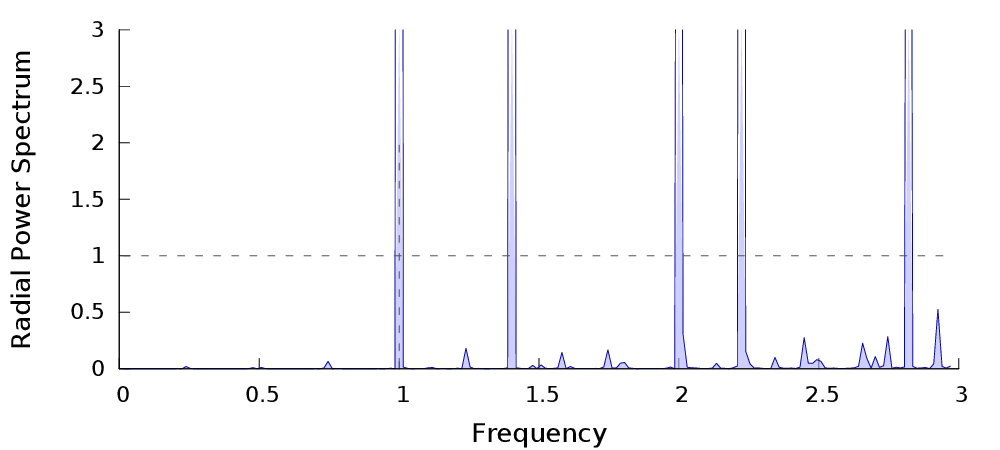
Caractéristiques fréquentielles
|
|
 |
|
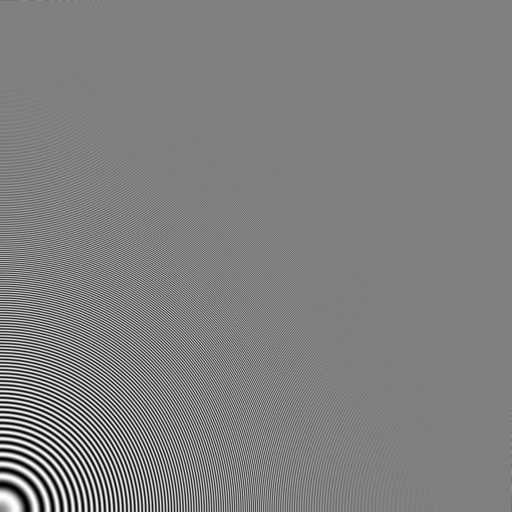
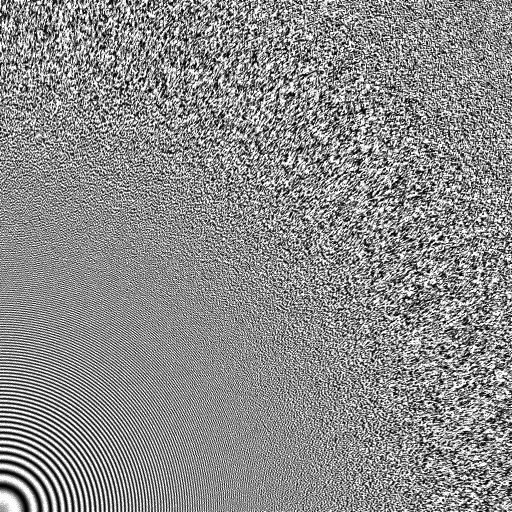
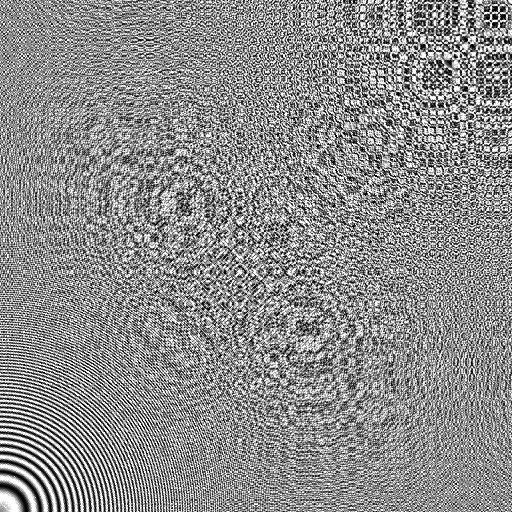
| $sin(x^2 + y^2)$ | 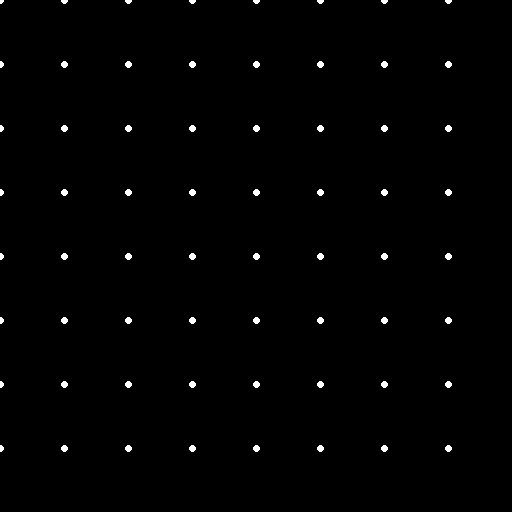 |
 |
 |
 |
 |
 |
 |
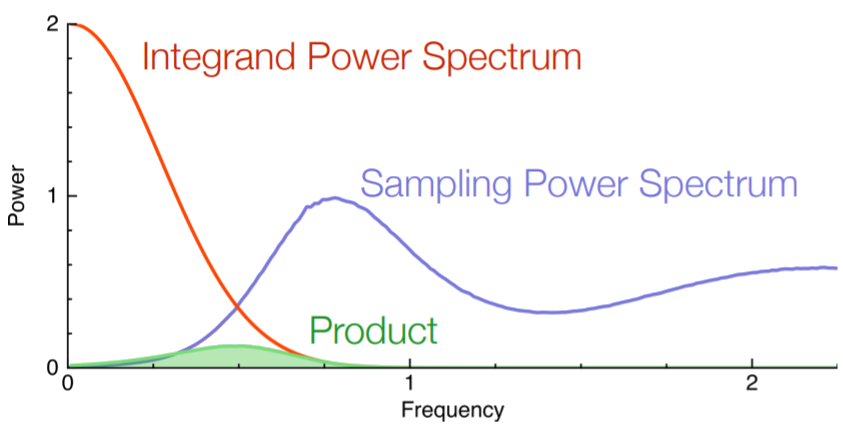
Analyse
$$S(x) = \frac{1}{n}\sum_{k=1}^n \alpha_k \delta(x-x_k)\quad \text{et son $m$-ième coefficient de Fourier}\quad \mathbf{S}_m = \frac{1}{n}\sum_{k=1}^n \alpha_k e^{-i2\pi m x_k}\,,$$ nous avons $$\mathcal{I}_n=\int_0^1 f(x)S(x)dx = \int_\mathbb{R} \mathcal{F}_f(v)\mathcal{F}_S(v)dv =\sum_{m=-\infty}^{\infty} \mathbf{f}_m^* \mathbf{S}_m$$
Si $S(x)$ est une réalisation d'un processus ponctuel :
$$\langle \Delta \rangle = \mathbf{f}_{0}^*(1 - \langle \mathbf{S}_0\rangle) - \sum_{m\in\mathbb{Z}, m\neq 0} \mathbf{f}_m^*\langle \mathbf{S}_m\rangle$$ $$Var({I}_n) = \mathbf{f}_0^*\mathbf{f}_0 Var(\mathbf{S}_0) + \sum_{m\in\mathbb{Z}, m\neq 0}\mathbf{f}_m^*\mathbf{f}_m\langle \mathbf{S}_m^*\mathbf{S}_m\rangle + \sum_{m \in \mathbb{Z}}\sum_{l \in \mathbb{Z}, l\neq m} \mathbf{f}_m^*\mathbf{f}_l\langle \mathbf{S}_m^*\mathbf{S}_l\rangle$$
$\langle \Delta \rangle =
\mathbf{f}_{0}^* - \sum_{m\in\mathbb{Z}, m\neq 0}
\mathbf{f}_m^*\langle \mathbf{S}_m\rangle$
$\langle \Delta
\rangle = 0$ si processus de Poisson ou non biaisé
$Var({I}_n) =\sum_{m\in\mathbb{Z}}\mathbf{f}_m^*\mathbf{f}_m\langle \mathbf{S}_m^*\mathbf{S}_m\rangle$
Caractéristiques fréquentielles
$Var({I}_n) =\sum_{m\in\mathbb{Z}}\mathbf{f}_m^*\mathbf{f}_m\langle \mathbf{S}_m^*\mathbf{S}_m\rangle$
Caractéristiques fréquentielles
$Var({I}_n) =\sum_{m\in\mathbb{Z}}\mathbf{f}_m^*\mathbf{f}_m\langle \mathbf{S}_m^*\mathbf{S}_m\rangle$
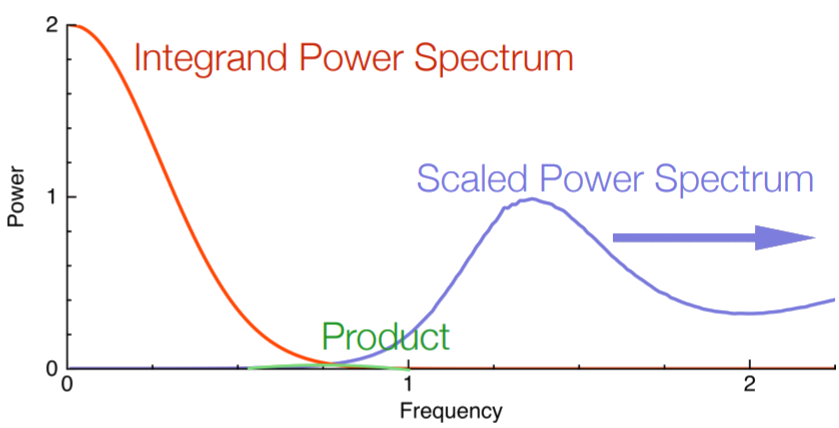
Contrôler la réduction de variance = contrôler les fréquences basses du processus ponctuel
Caractéristiques spatiales
Processus ponctuels stochastiques (Pair Correlation Function, Analyse différentielle, ...)
Ce que l'on cherche
Processus ponctuels :
- Uniformes dans $[0,1)^d$
- Borne asypmtotique sur l'erreur ou la variance de l'estimateur de MC / QMC
Contexte rendu d'images :
- Plutôt faible dimension de l'estimateur (~30/40)
- Peu de structures (aliasing) et donc corrélation des échantillons
- Faible erreur à peu d'échantillons
- Echantillonneur rapide et progressif

Polyhex
Système de pavage apériodique avec précalculs

- Très grande vitesse de génération d'échantillons bruit bleu (+ 1 million de points par seconde)
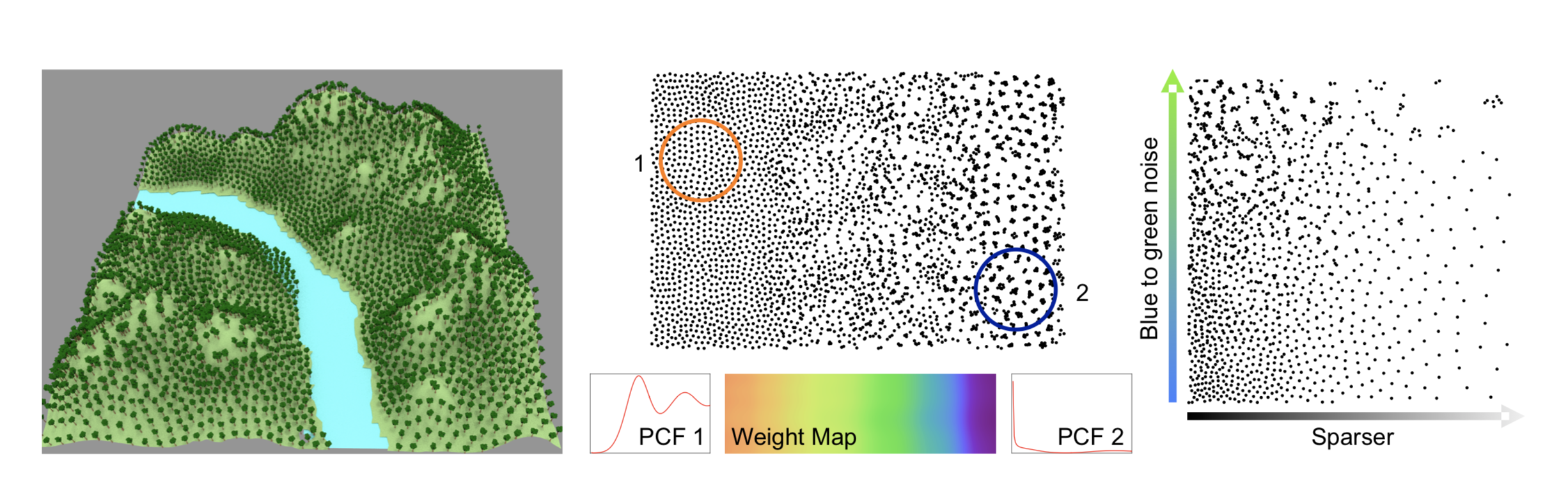
- Contrôle local de densité
...mais...
- Uniquement 2D
- Tables pré-calculées de grande dimension
- 2D
- Très rapide
- Distribution bruit bleu quasi-parfaite
- Pour des densités non-uniformes
- 2D uniquement
- Système de tuiles nécessitant une très grande table annexe
Low Discrepancy Blue Noise
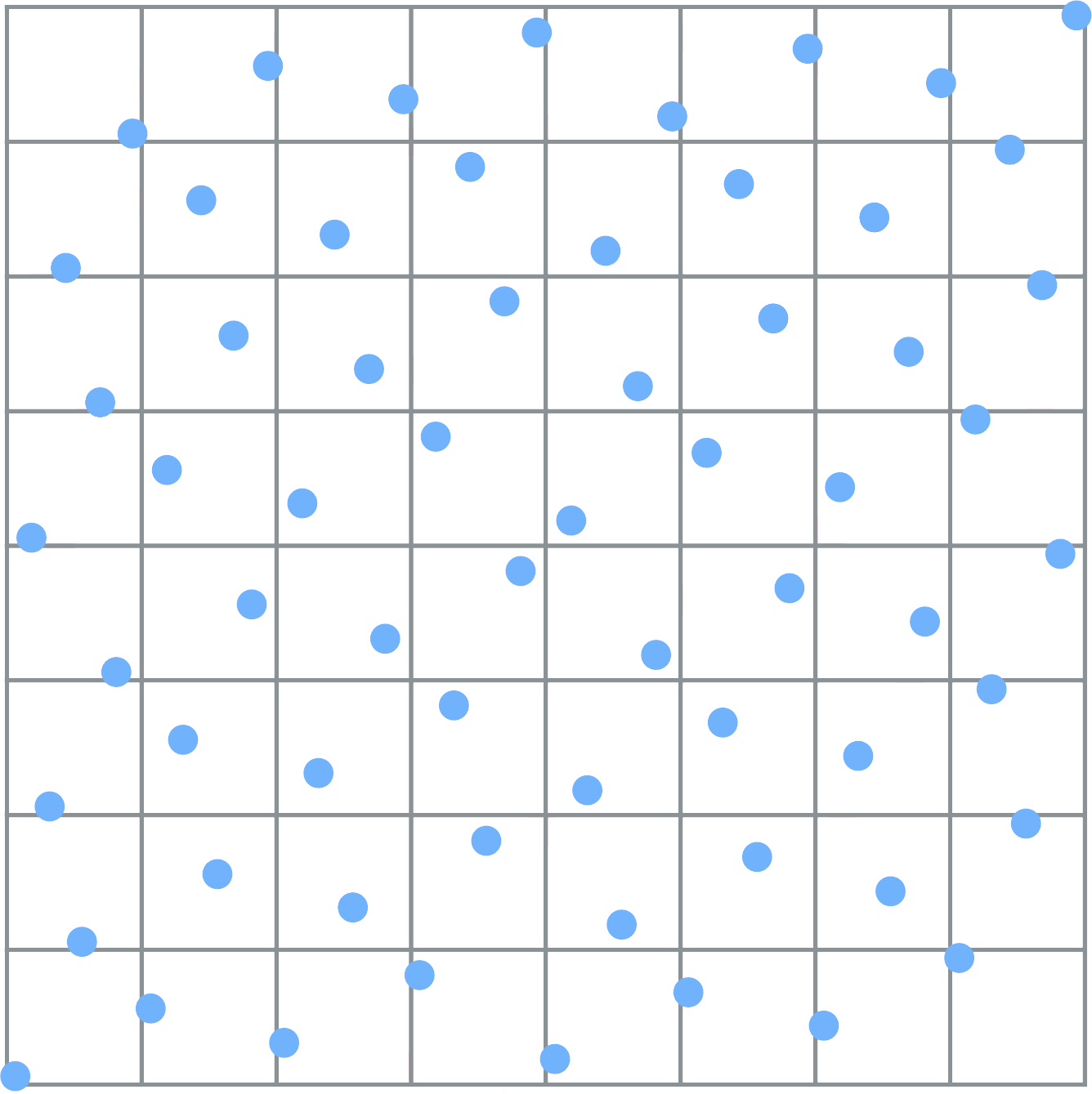
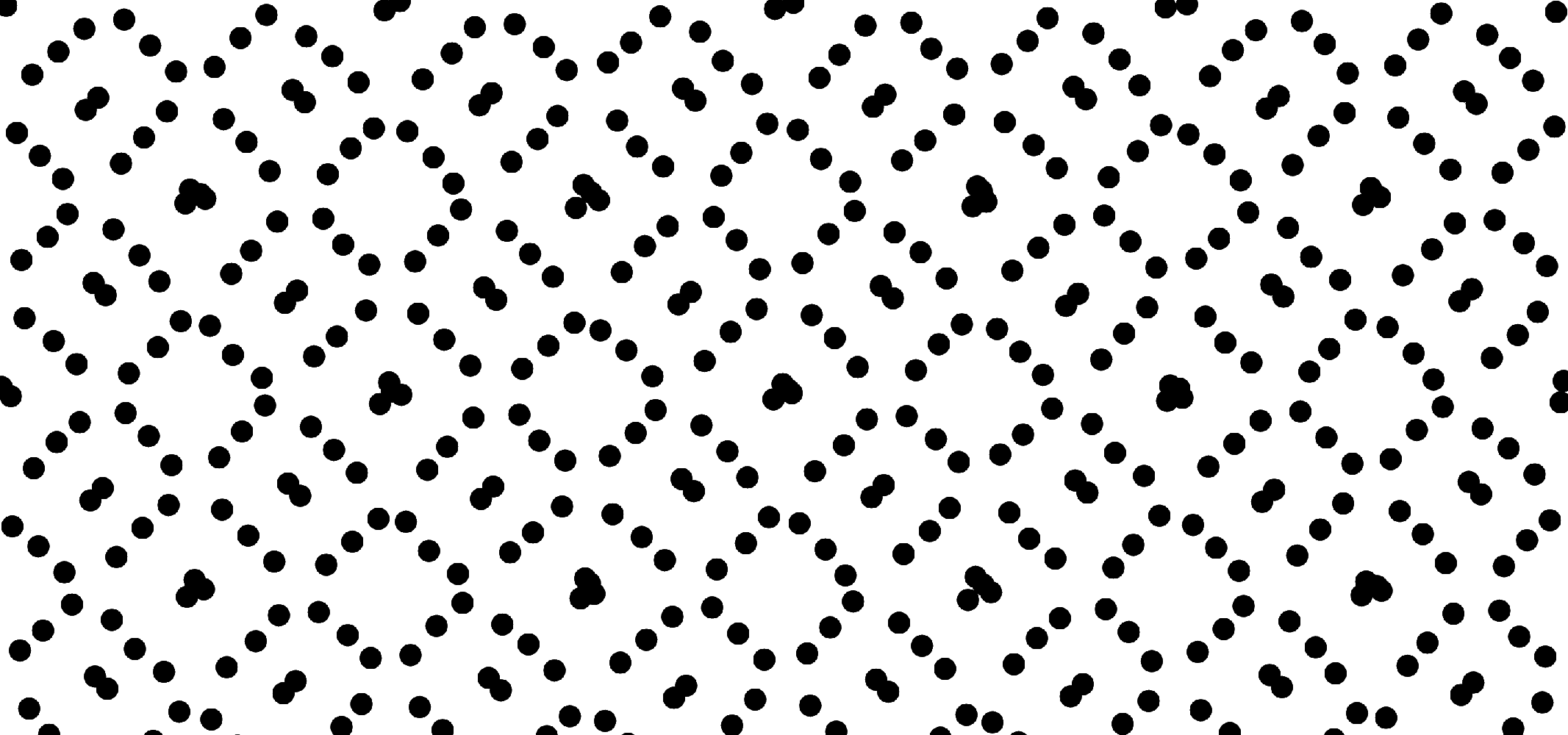
Bruit bleu basse discrépance 2-D
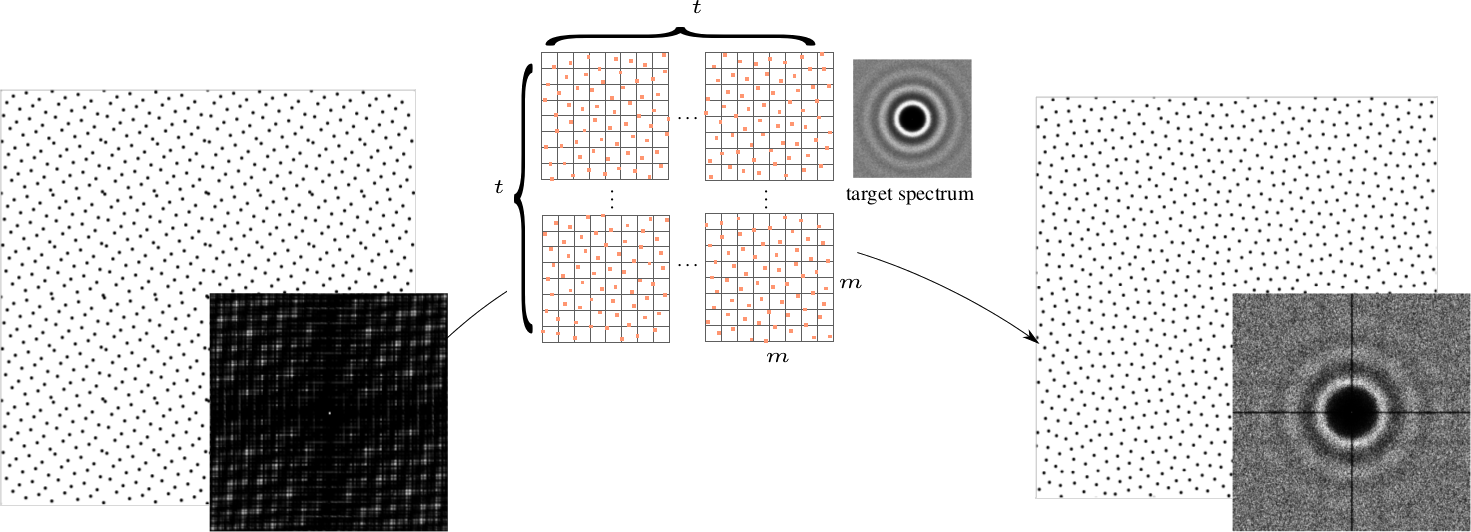
Notre méthode
 |
 |
 |
Notre méthode
Notre méthode
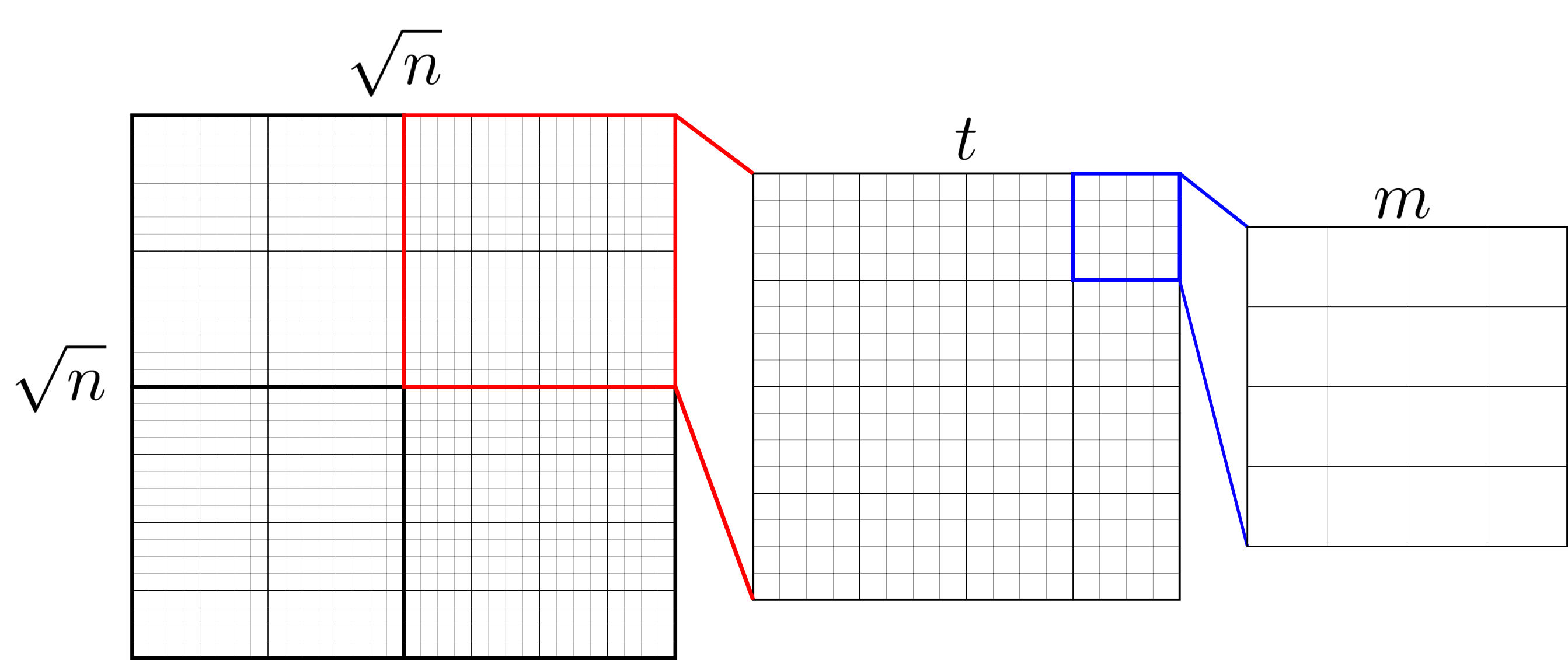
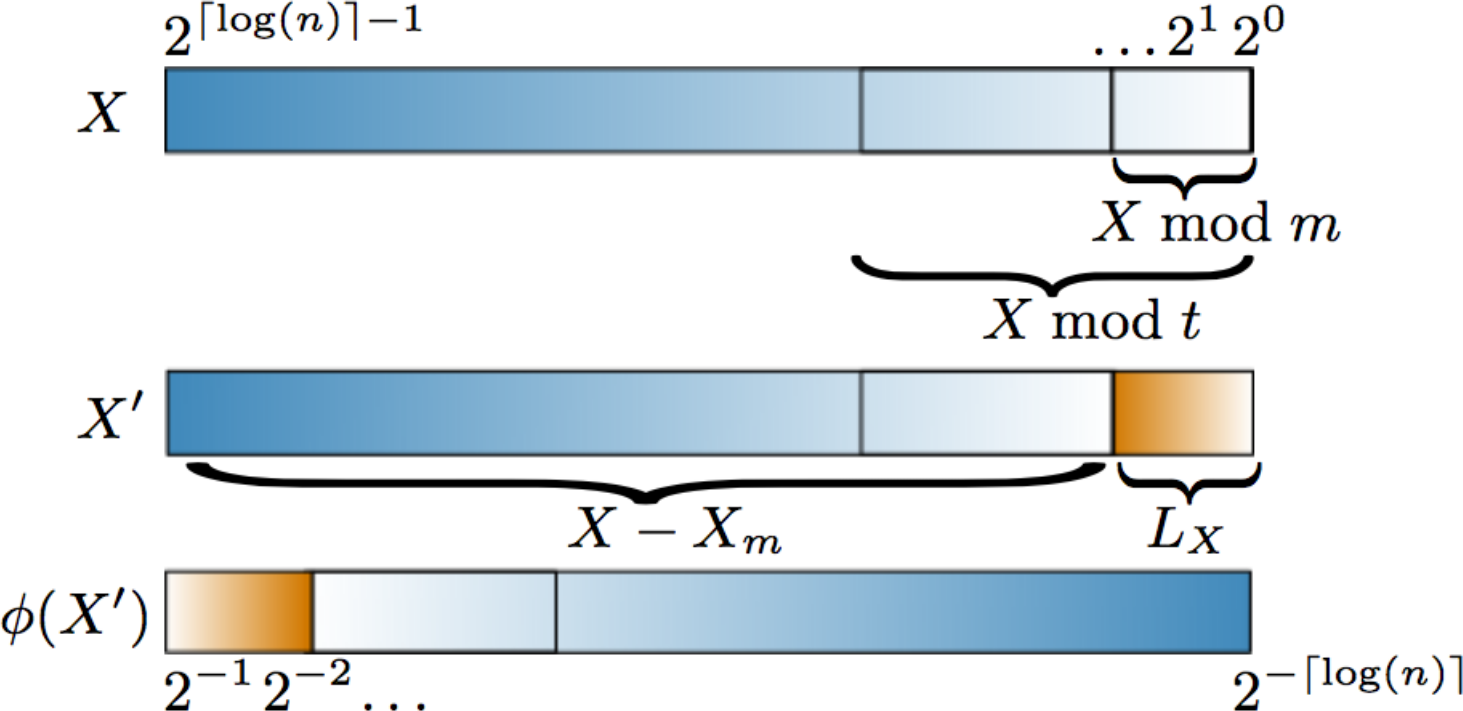
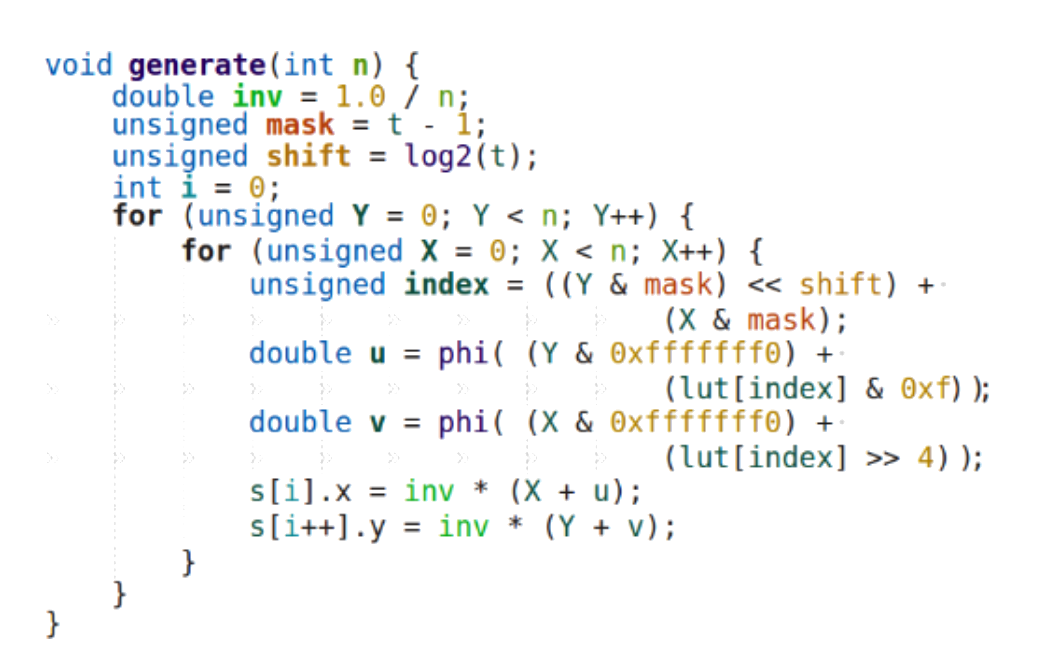
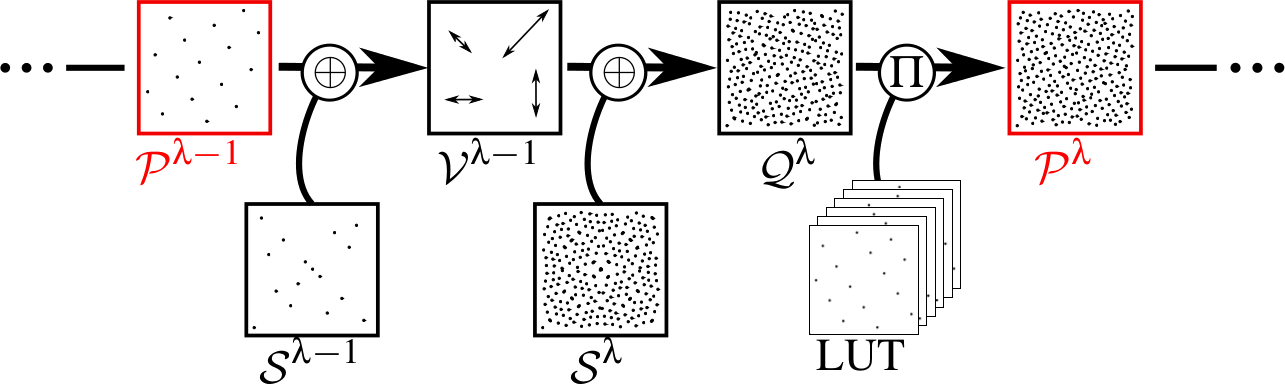
On calcule les permutations de taille $m$ à partir d'un ensemble de taille $t^2$. On les stocke ensuite dans une LUT pour générer des ensemble de taille $n$.
Notre méthode
Notre méthode
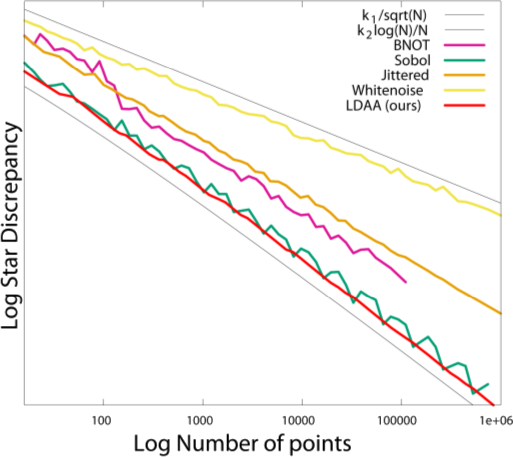
Résultats
 |
 |
| BNOT [GBO+12] | Sobol [Sob67] |
 |
 |
| Owen's Scrambling [Owe95] | LDBN ($m=16$, $t=128$) |
Résultats
|
|
| BNOT [GBO+12] | LDBN ($m=16$, $t=128$) |
 |
 |
| Step [HSD13] | LDBN ($m=16$, $t=128$) |
Résultats
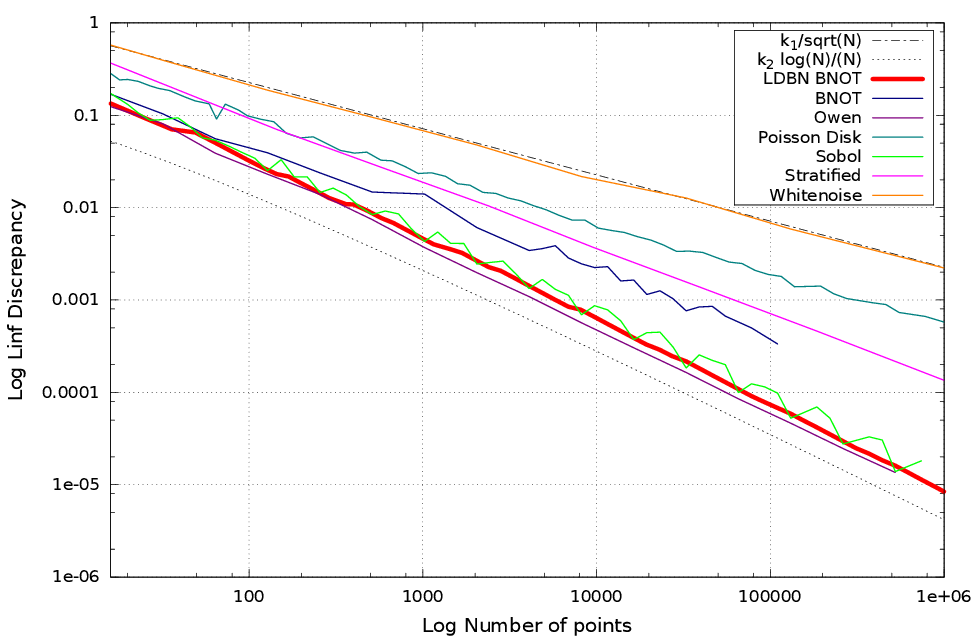
Résultats
Résultats
Résultats
Résultats
 |
 |
 |
 |
| BNOT [GBO+12] | Sobol [Sob67] | Owen's Scrambling [Owe95] | LDBN ($m=16$, $t=128$) |
- 2D
- Très rapide
- Très bonne distribution bruit bleu
- Propriétés de basse discrépance
- 2D uniquement
- Notion d'ensemble basse-discrépance mais pas de séquence
Sequences with Low-Discrepancy Blue-Noise 2-D Projections
Principe
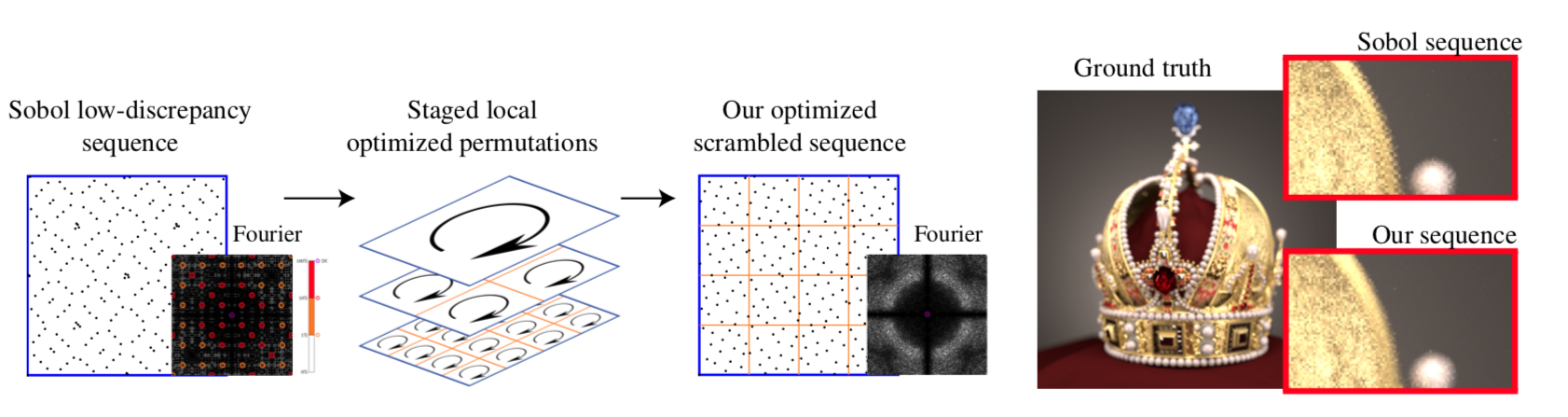
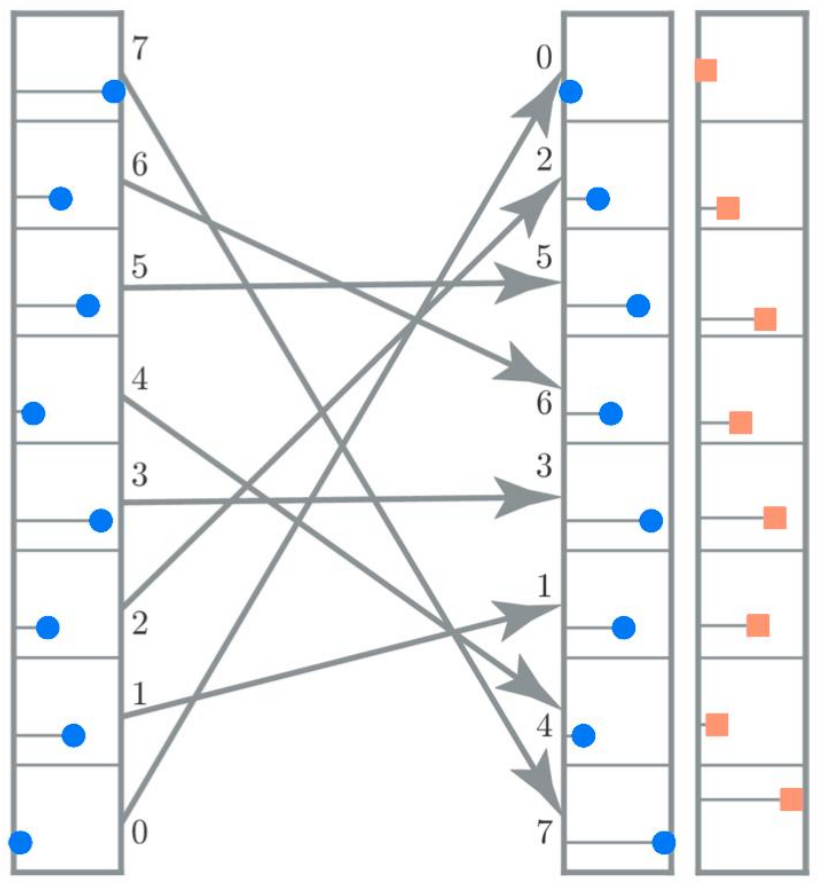
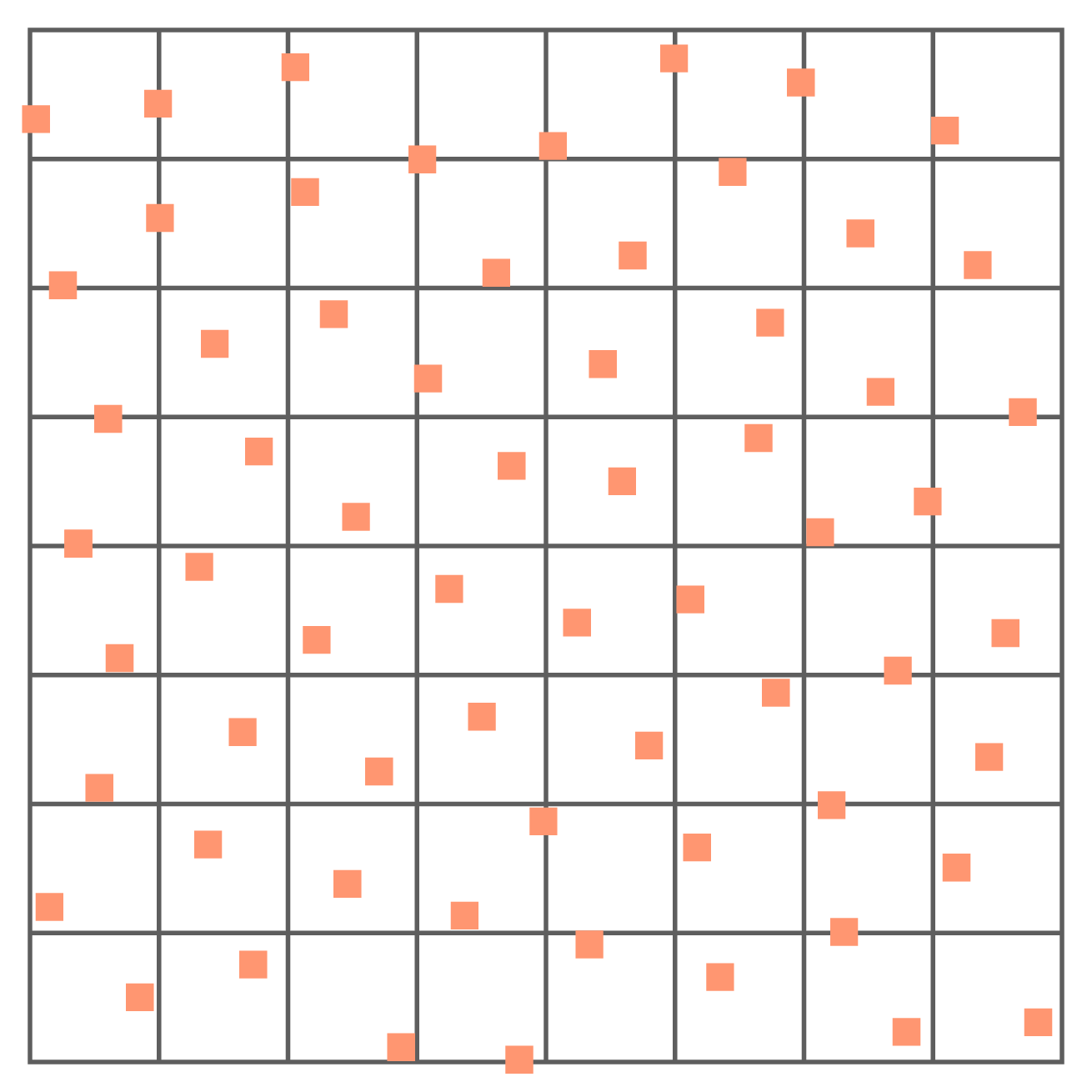
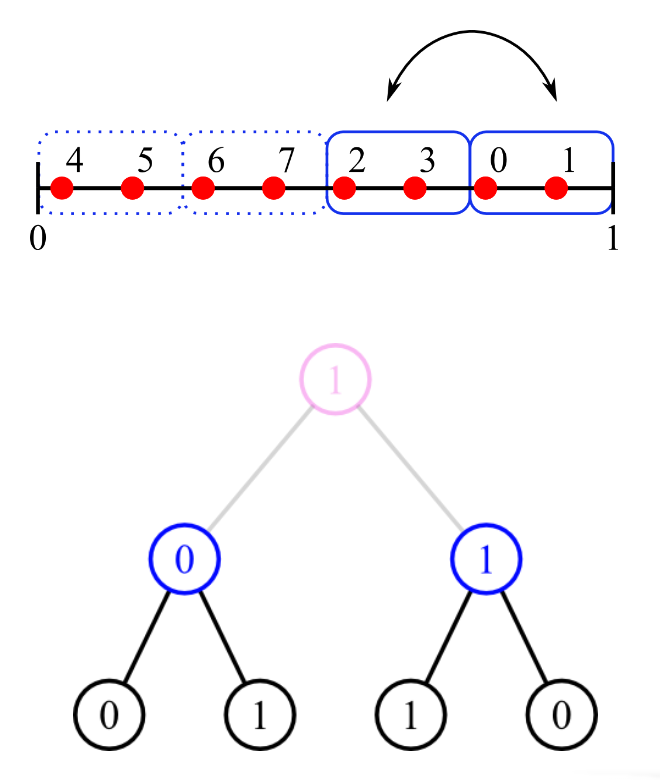
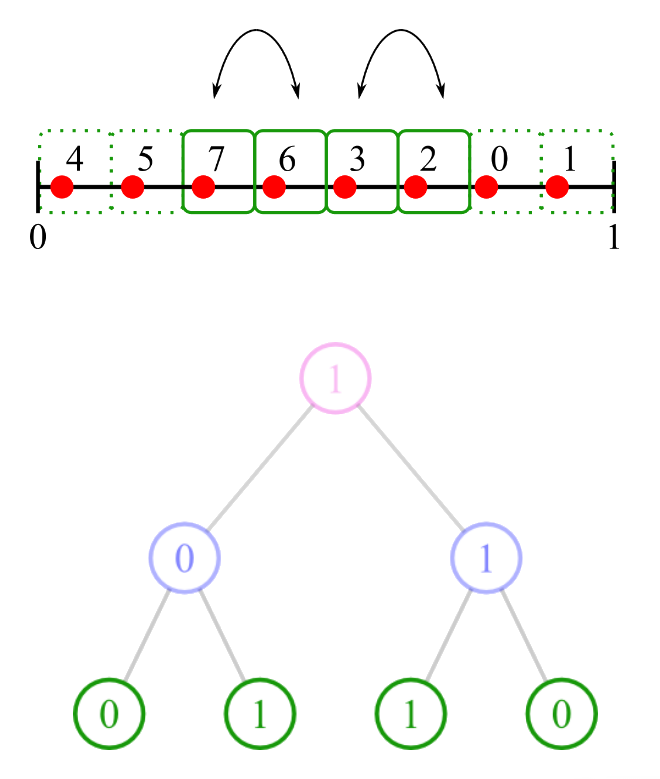
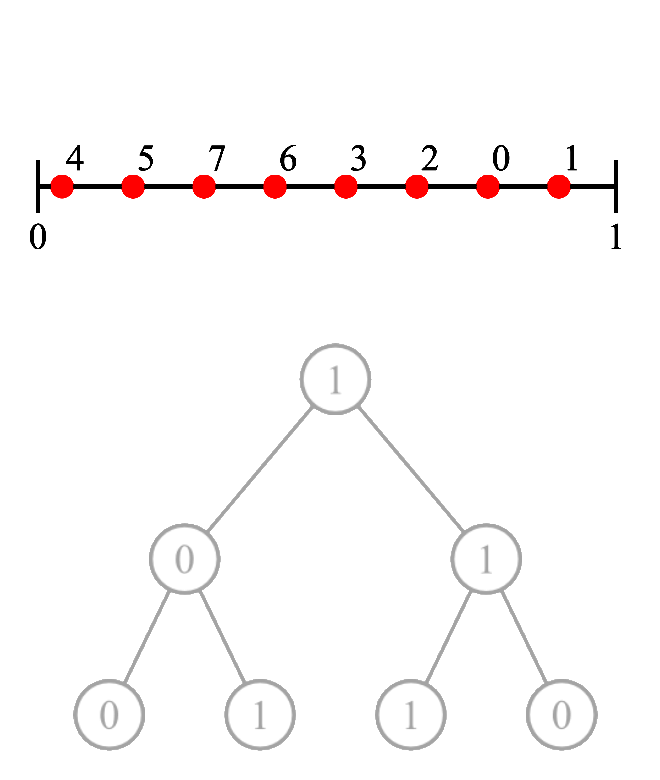
Owen's scrambling [Owe95]
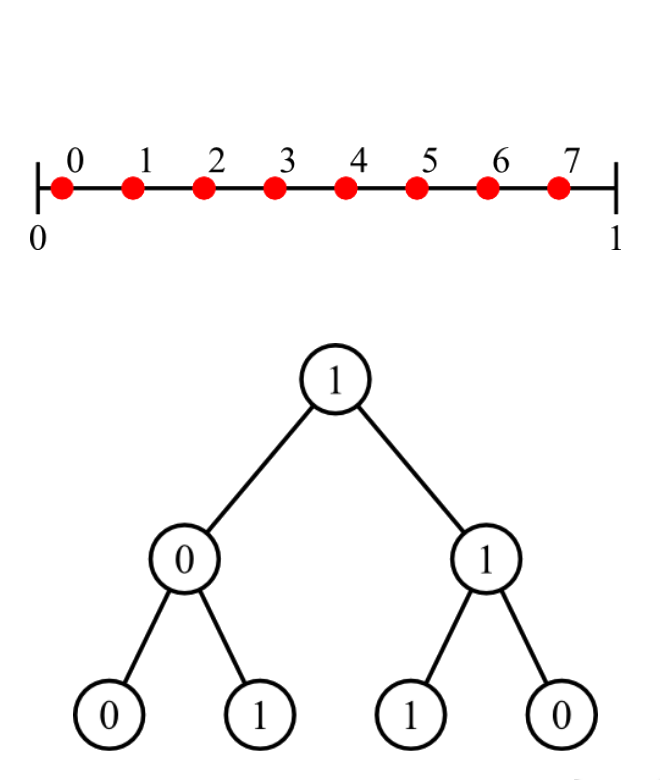
Owen's scrambling [Owe95]
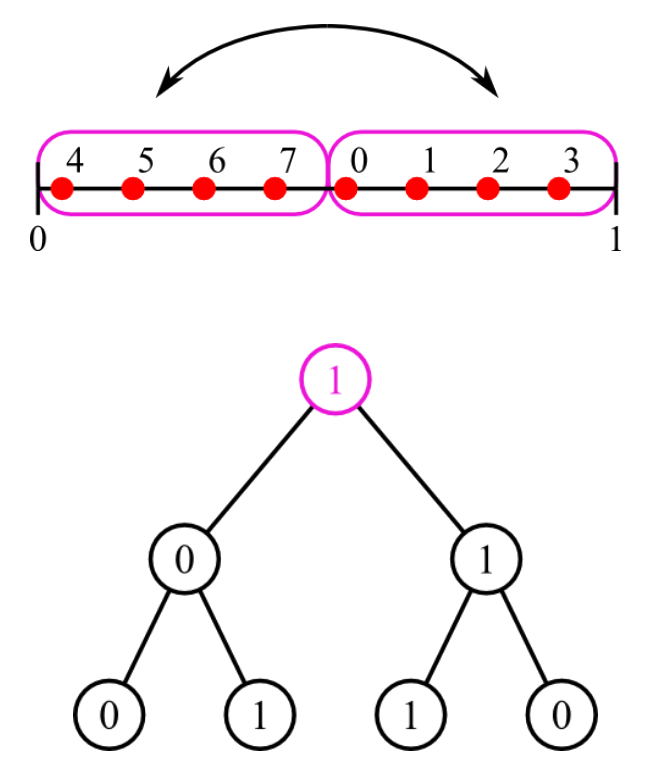
Owen's scrambling [Owe95]
Owen's scrambling [Owe95]
Owen's scrambling [Owe95]
Owen's scrambling [Owe95]


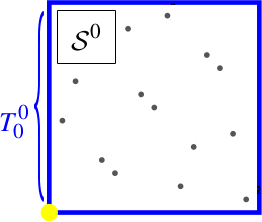
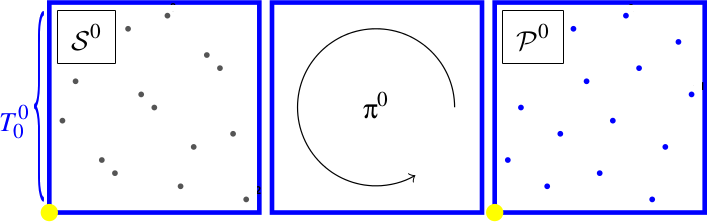
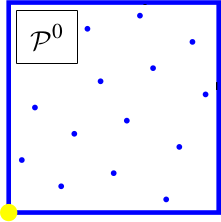
Niveau 1, 2-D, $K=4$
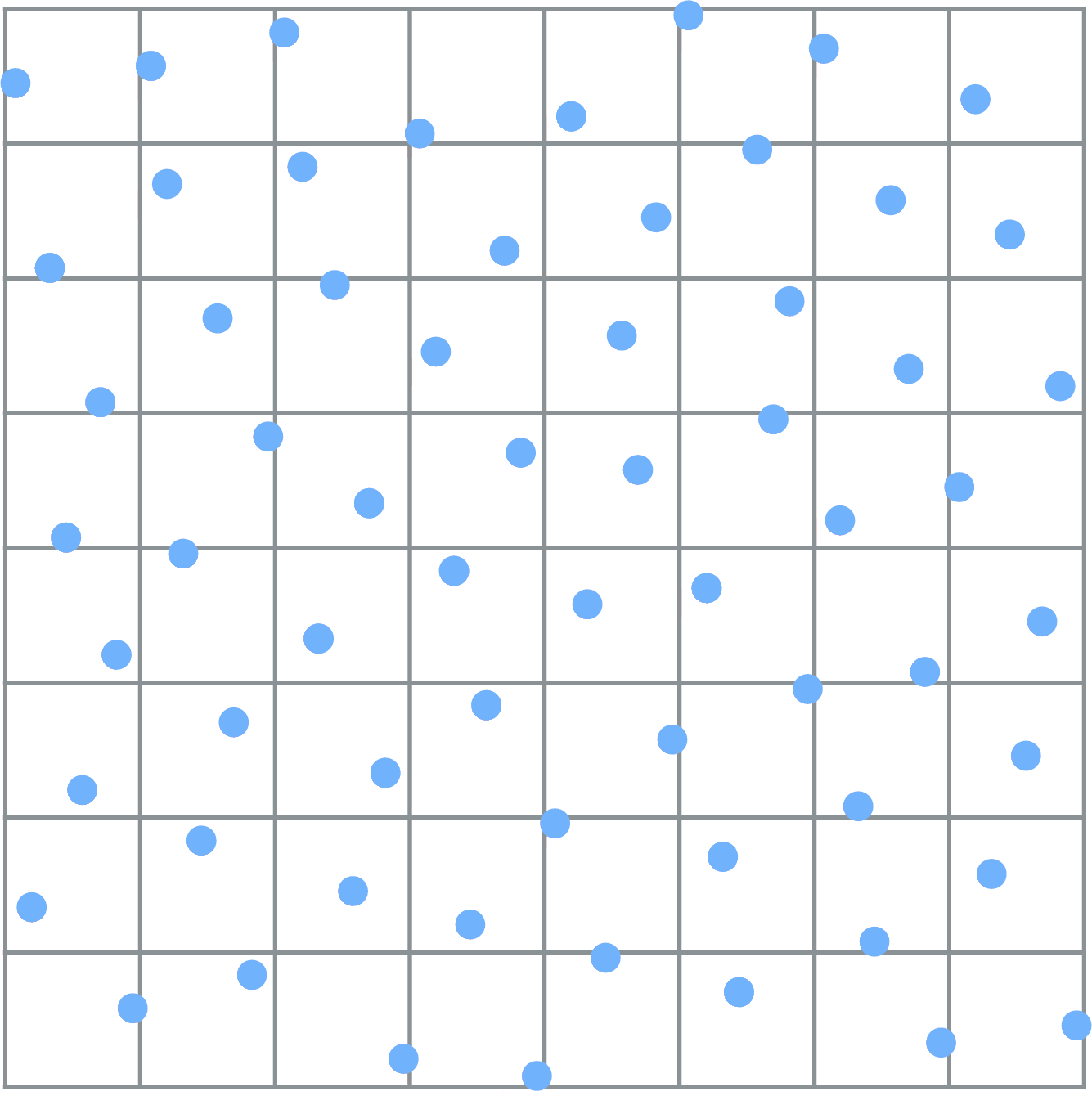
On génère $K^d=16$ points à partir de Sobol. On note cet ensemble $\mathcal{S_0}$.
Et on les mélange en utilisant un Owen scrambling pour leur donner un spectre bruit bleu. On note le nouvel ensemble $\mathcal{P_0}$.
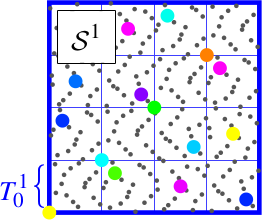
Niveau 2, 2-D, $K=4$
On génère $K^{2d}=256$ points à partir de Sobol. On note cet ensemble $\mathcal{S_1}$.
On commence par appliquer un scrambling global sur cet ensemble pour reconstruire $\mathcal{P_0}$. On note le nouvel ensemble $\mathcal{Q_1}$.
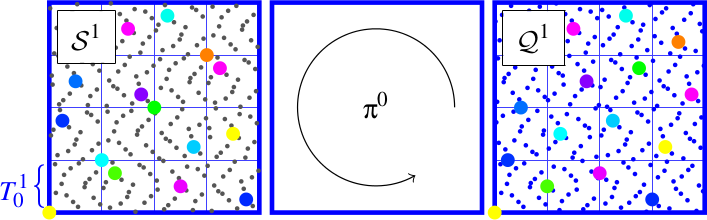
Niveau 2, 2-D, $K=4$
Ensuite, on scramble les points dans chaque tuile $\mathcal{T_1^{i}}$ de $\mathcal{Q_1}$ pour obtenir un spectre globalement bruit bleu.

Et ainsi de suite ...
Garanties
Si l'ensemble initial est dyadique en base $K$ (et donc est basse discrépance), notre ensemble de permutations locales préserve la dyadicité de cet ensemble (et donc la basse discrépance).
Garanties
Si l'ensemble initial est dyadique en base $K$ (et donc est basse discrépance), notre ensemble de permutations locales préserve la dyadicité de cet ensemble (et donc la basse discrépance).
Si l'ensemble initial est dyadique en base $K$ (et donc est basse discrépance), notre permutation globale préserve la dyadicité de cet ensemble (et donc la basse discrépance).
Garanties
Si l'ensemble initial est dyadique en base $K$ (et donc est basse discrépance), notre permutation préserve la dyadicité de l'ensemble (et donc la basse discrépance).
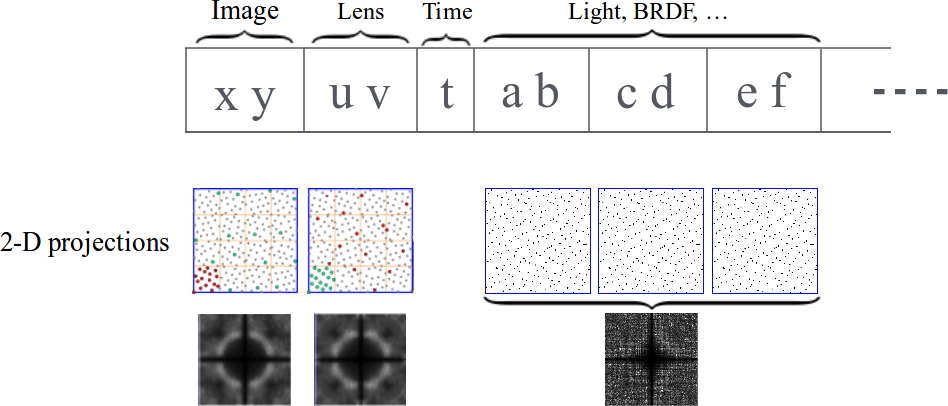
Pipeline final
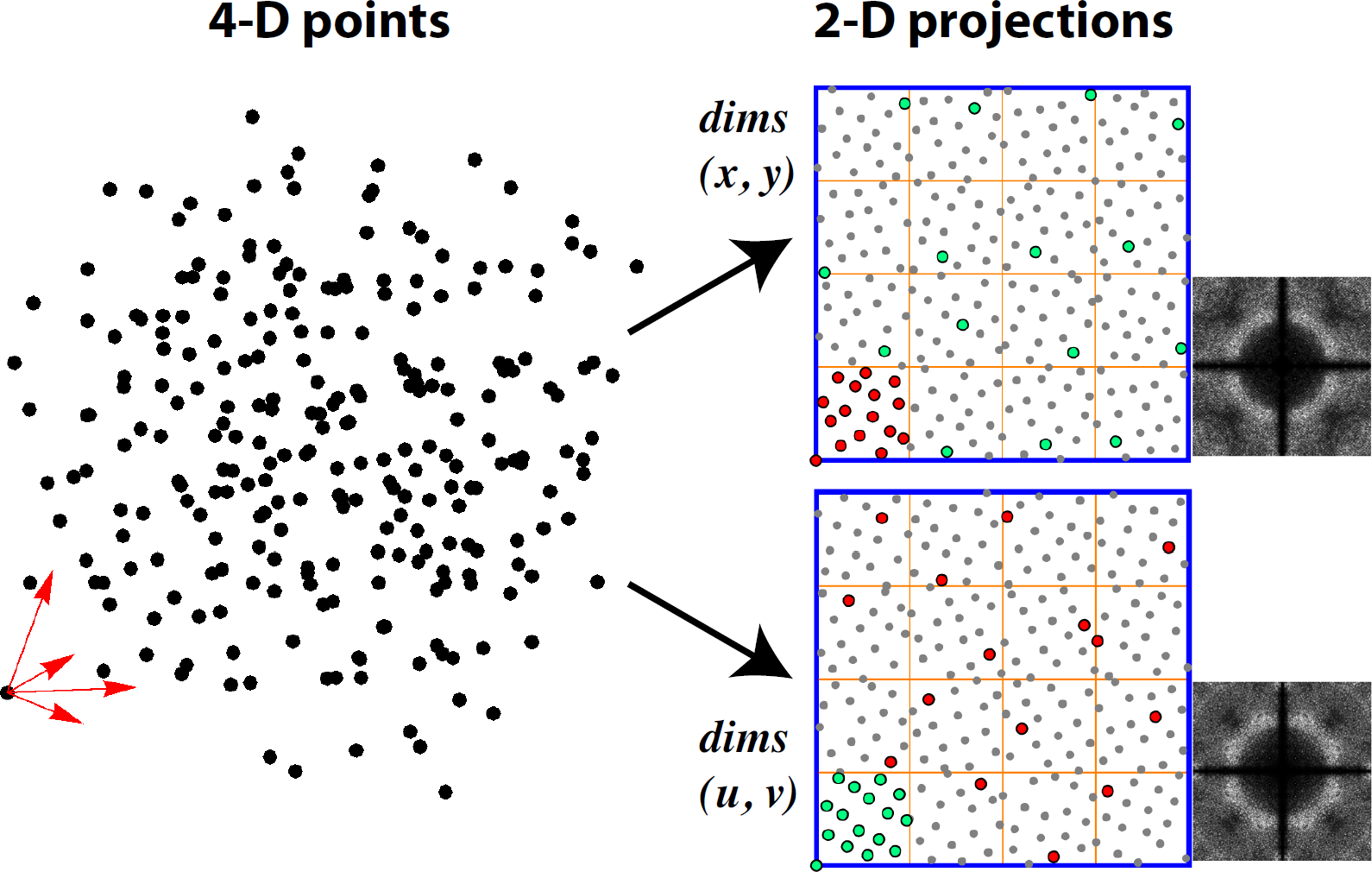
n-D
n-D obtenu par scrambling indépendant de projections 2D.
Adaptatif
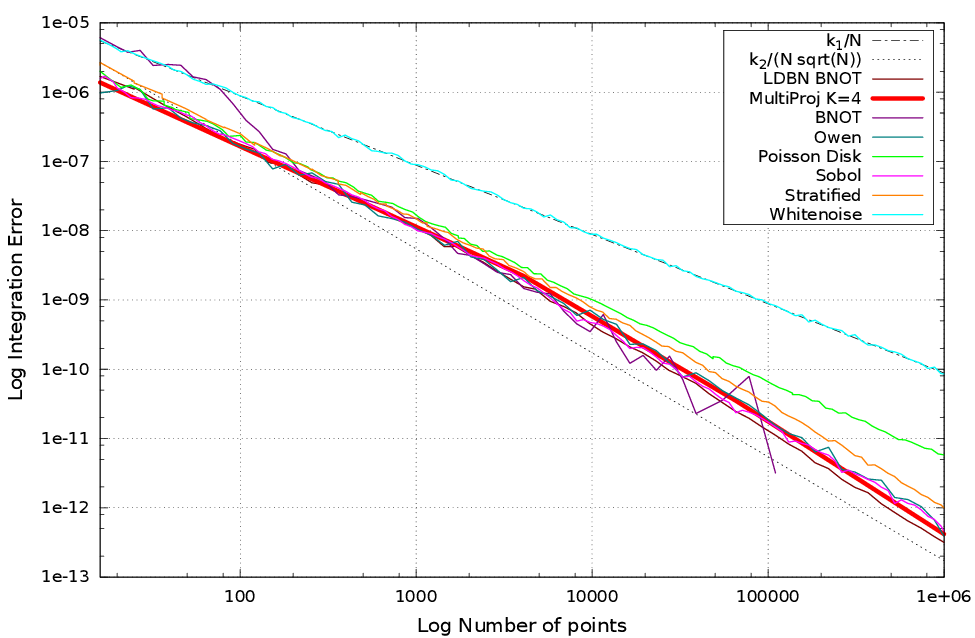
Résultats
|
 |
| BNOT [GBO+12] | Owen's Scrambling [Owe95] |
|
 |
| LDBN | MultiProj |
Résultats
Résultats
Résultats

Résultats
Résultats
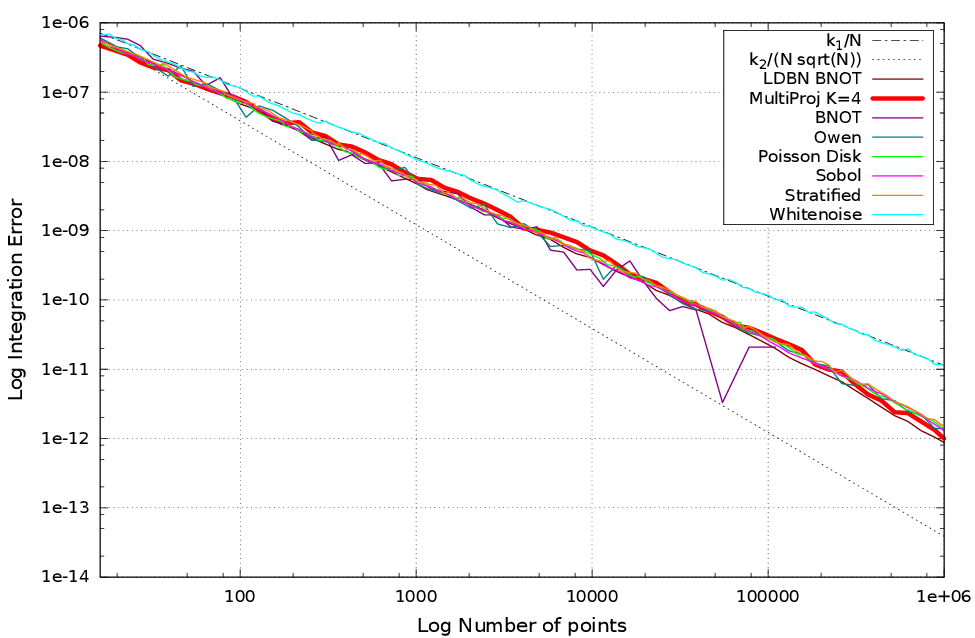
Résultats
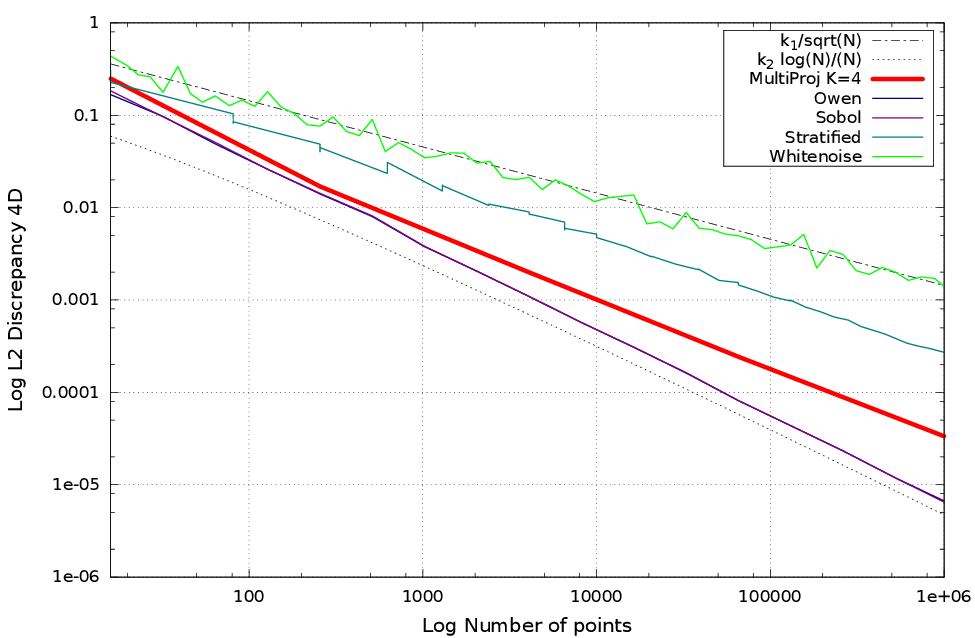
n-D
En fonction de $K$ on peut optimiser un certain nombre de dimensions.
Résultats


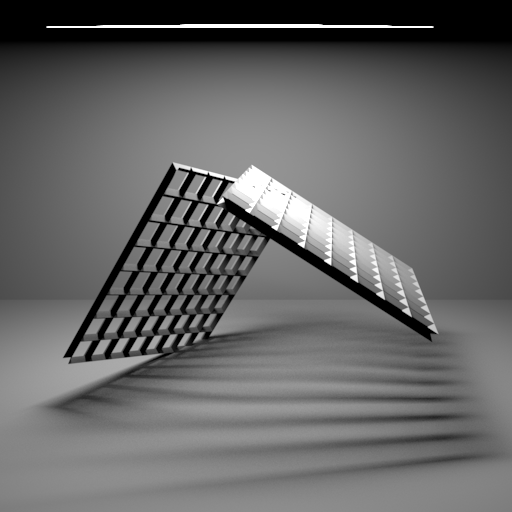
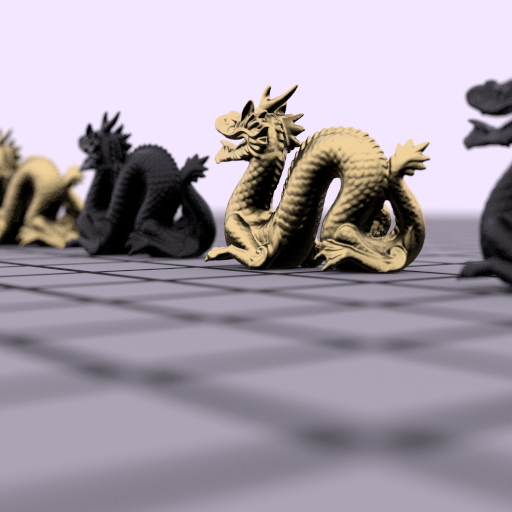
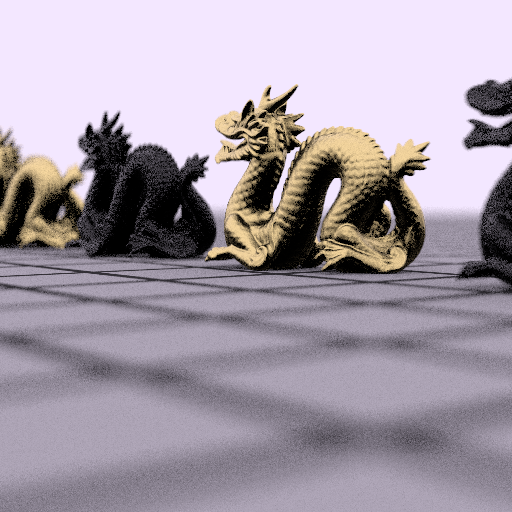
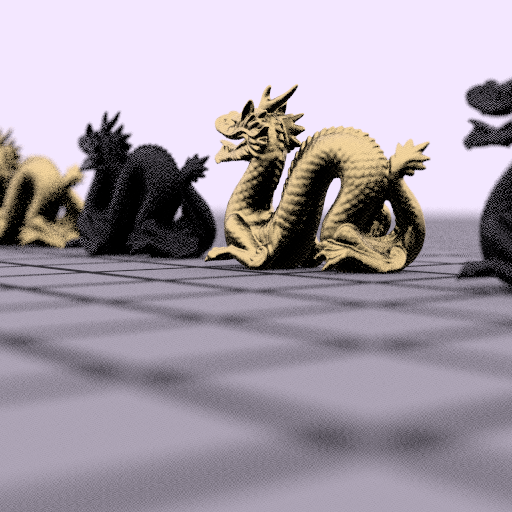
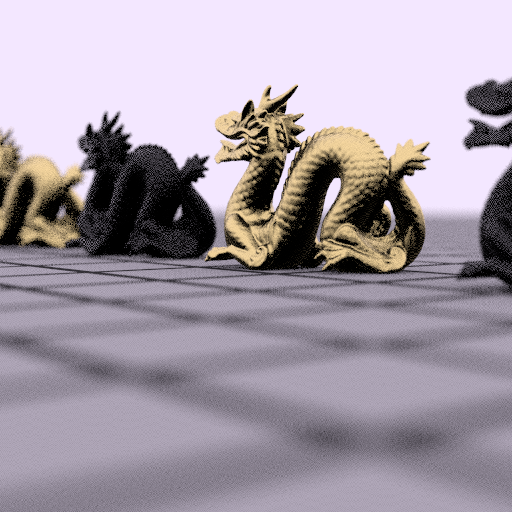
Echantillons 4-D, 16 samples per pixel.
 |
 |
 |
 |
| Stratified (MSE:0.0022) | Sobol [Sob67] (MSE:0.0018) | Owen's Scrambling [Owe95] (MSE:0.0017) | MultiProj K=8 (MSE:0.0018) |
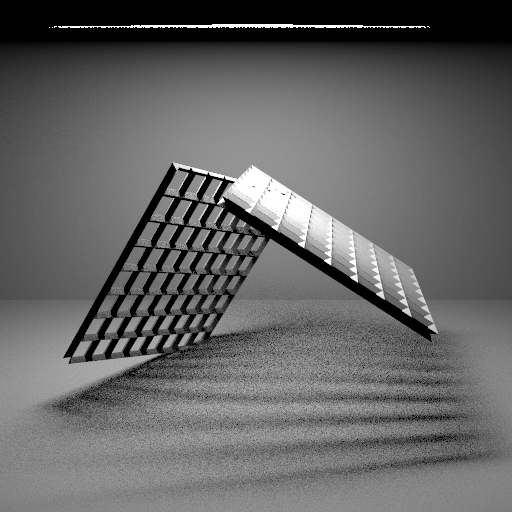
Résultats
Echantillons 10-D, 16 samples per pixel.
 |
 |
 |
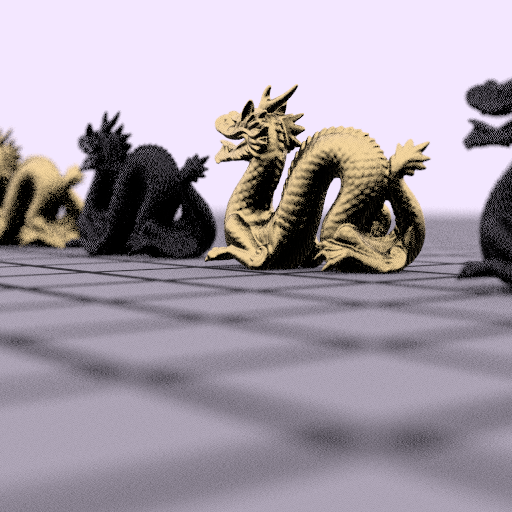 |
| Stratified (MSE:0.0017) | Sobol [Sob67] (MSE:0.0015) | Owen's Scrambling [Owe95] (MSE:0.0016) | MultiProj K=8 (MSE:0.0013) |
- n-D
- Très rapide, adaptative
- Distribution bruit bleu par paires de dimension
- Séquence
- Basse discrépance dans les projections 2D uniquement
- Bonne discrépance observée en n-D
- Forcer le coté séquence et LDS dégrade le spectre (moins bien que LDBN par exemple)
- Toujours un ensemble de permutations optimisées
Conclusion & perspectives
Conclusion
Combiner bruit bleu et basse discrépance est possible sans perte de qualité
En 2-D:
|
 |
En $d$-D:
|
|
... mais cela reste compliqué (pré-calculs, moins bonne qualité si séquentiel...)
Outils
- Test d'unformité via mesure de discrépance (LDS)
- Analyse fréquentielle
- Analyse spatiale (stochastic point process)
Perspectives
- Transport optimal comme mesure d'uniformité (fonctionne aussi sur des densités)
- Exploitation du terme croisé intégrande/echantillonnage dans l'analyse spectrale (multiple importance sampling, cas non stationnaire...)
- Caractère "bruit bleu" pas nécessaire en dimension $d$
- ... mais critique dans les projcetions.
- Corrélation des échantillons utilisés dans les estimateurs Monte-Carlo "pixels" dans le plan image
Le framework UTK !
Agrégation de tous les échantillonneurs et outils développés lors
de cette thèse.