Introduction, numerical images and geometrical representation
Preliminaries
Goals
Lectures
- Introduce fundamental concepts in computer graphics, image
processing, digital geometry and computational geometry
- Illustrate links between geometrical analysis of shapes and related
fields (complexity, arithmetic, word theory, ….)
Practical work (TP)
- Implement some image processing/shape analysis tools
- Comparative evaluation principles (tests, asymptotic
vs. experimental computational costs…)
Infrastructure
Github project https://github.com/dcoeurjo/lectureDG
- Lecture sources
- Practical work
git clone https://github.com/dcoeurjo/lectureDG.git
Practical work
Homework, project, final exam
- One practical work session will be evaluated
- Homework
- Final exam
Context: Analysis of geometrical objects
Geometrical objets
- From acquisition devices
- CCD devices
- tomographic images (IRM, scanners X, …)
- From modeling processes
- Geometrical modelers, CAD (computer-aided design)
- From mathematical modeling of phenomena
Analysis
- … computer-based -> algorithms
- … quantitative
- Scalar shape descriptors
- Geometrical paramters
- Topological invariants, …
- -> quality, robustness, certified computations, …
Couple of Acquisition Devices
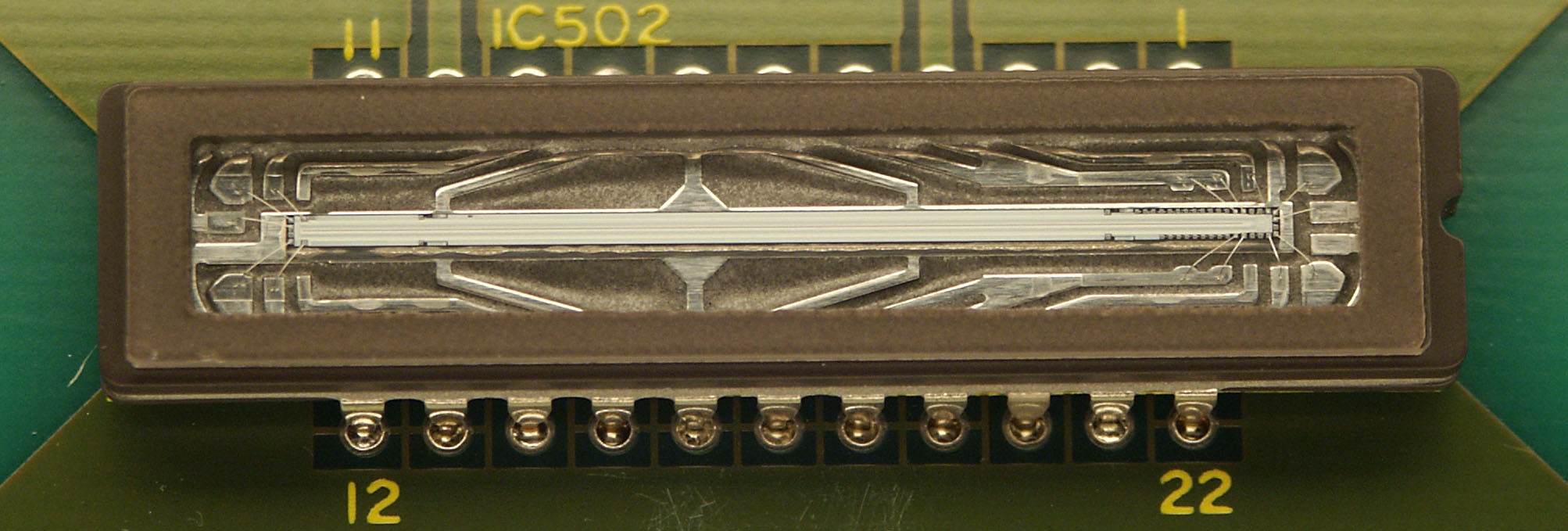
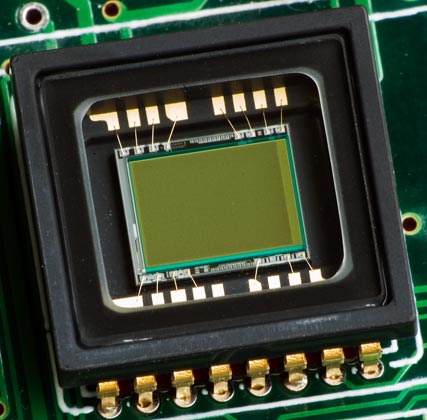
CCD Device
Charged-Coupled Device
Principles photo-active regions/pixels : each unit if surface
element accumulate some electrical charges proportional to the
intensity of received light
photon -> electron charges
|
|
|
| Linear device |
2D device |
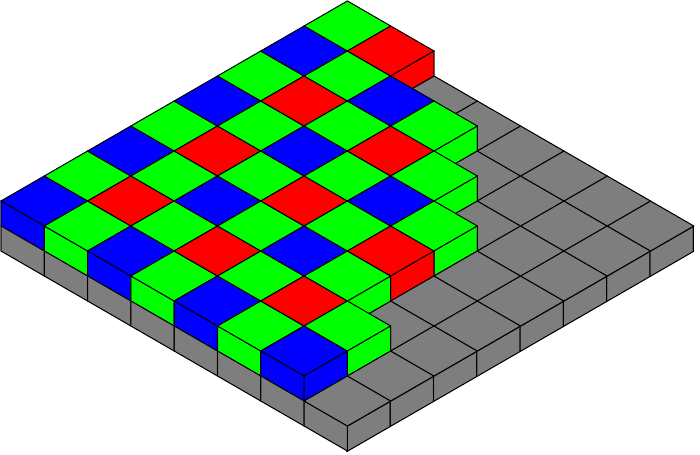
Bayer pattern |
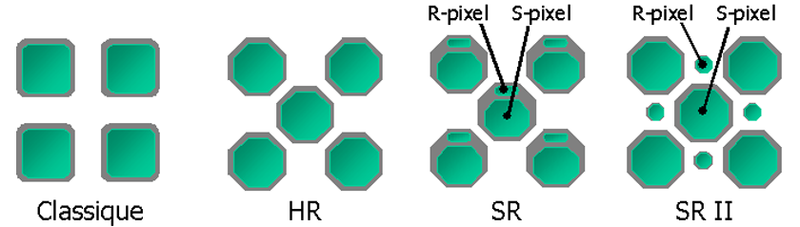
Physical notion of pixels
Associated Modeling
By construction
- Underlying support geometry is induced by a periodic tiling
- Values are quantified on a small number of bits
def.
Image:
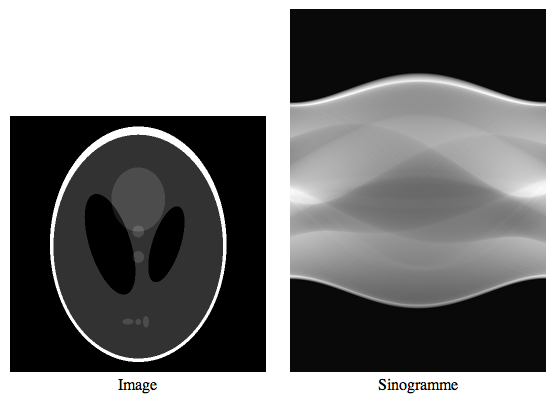
Tomography
Principles
- particles are emitted (ions, protons, photons, …) from a source
device to a target (object, body, …)
- a detector measures particles intensity after the object
traversal. The intensity decay is a function of the time flight and
the traversed material)
- the image is reconstructed from attenuation measurements using
back-projection approaches
Tomography (bis)
Basic Idea Radon’s Theorem
 = \int_{-\infty}^{+\infty} \int_{-\infty}^{+\infty} f(x,y)\delta(t-x \cos(\theta) - y \sin(\theta)) dxdy](_images/math/96aa0df6f43c74973176e754d34495523cb2d3ca.png)
 Dirac measures
Dirac measures
<demo>
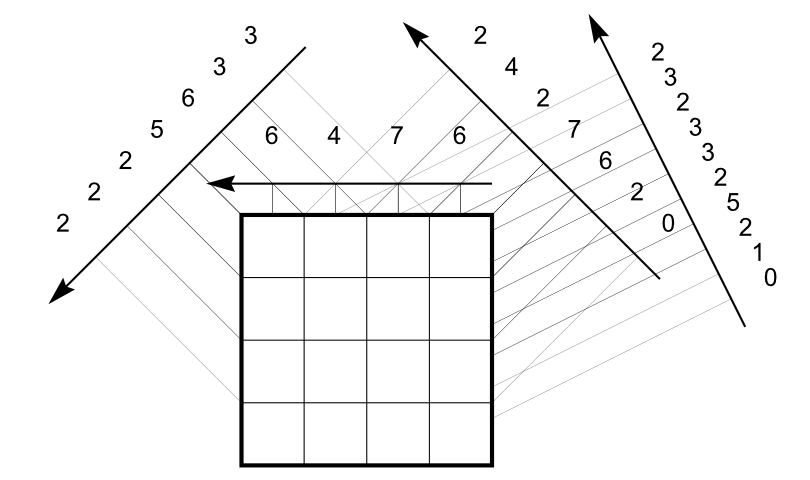
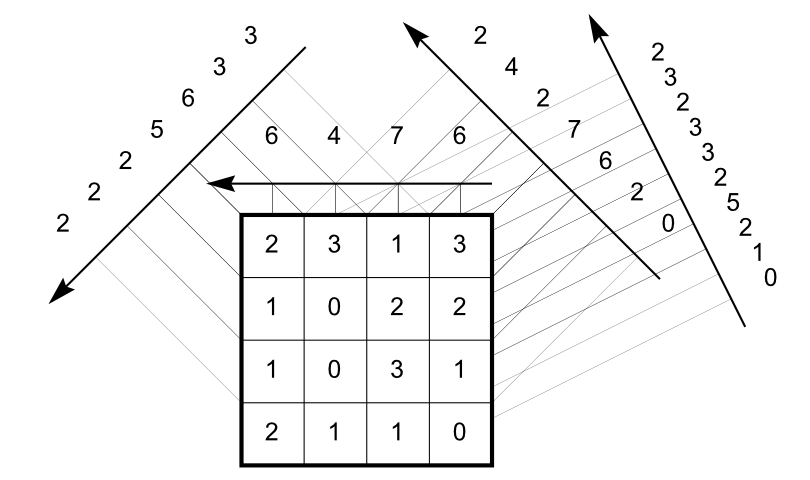
Digital Tomography
Specificities
- Projection directions: rational straight lines
 (
( )
)
- Projection function: sum of digital point values along the rational
straight line
- Data to reconstruct: binary values {0,1} or in

Problems
- Number of required projections
- Uniqueness of the reconstruction
- Sometimes, further hypotheses are required (convexity,
smoothness, …)
|
|
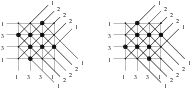
Example: Mojette Transform
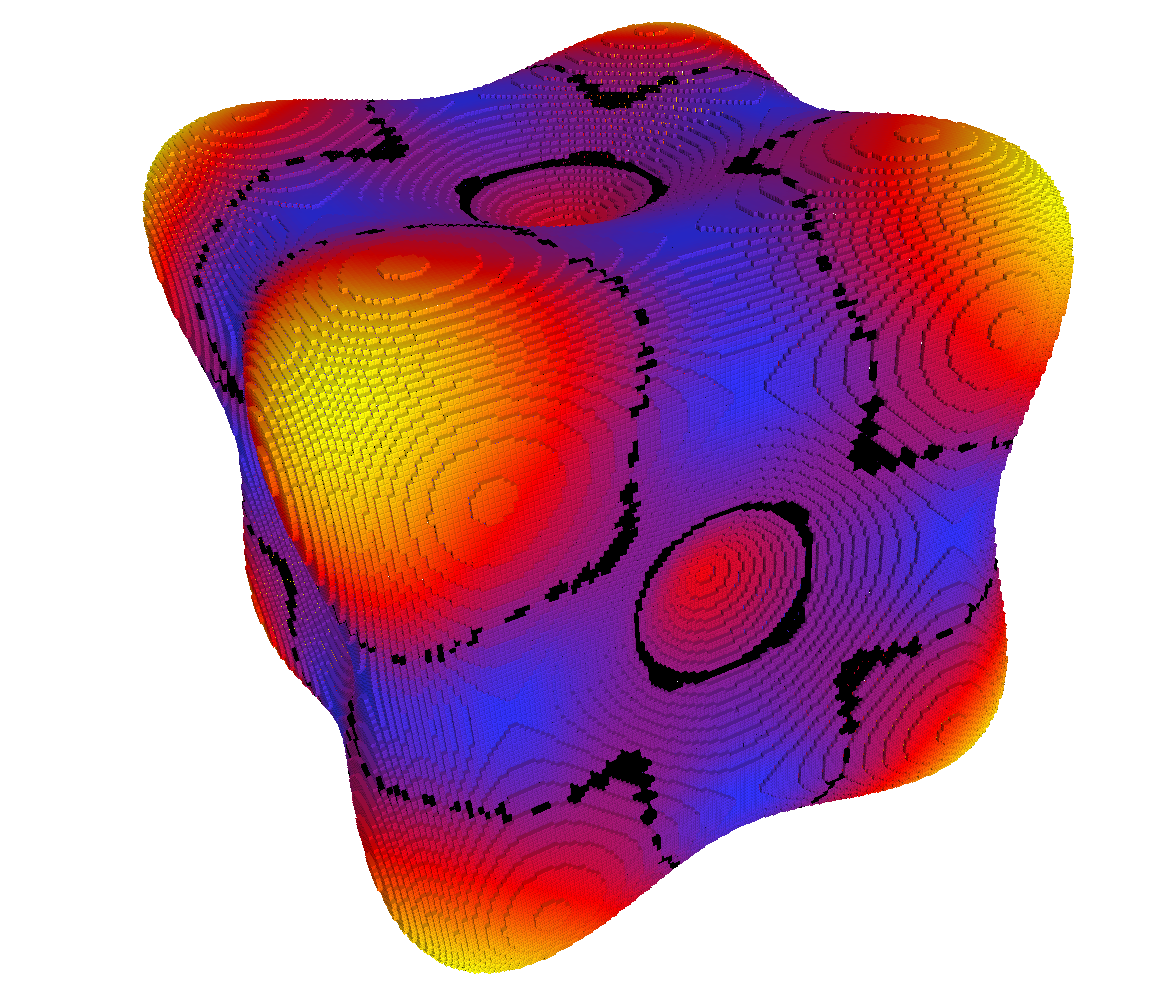
Digital Tomography: conclusion
By construction or for efficiency of the reconstruction process
from projections, the result isusually defined in regular lattices
in 2D or 3D
def.
Image:
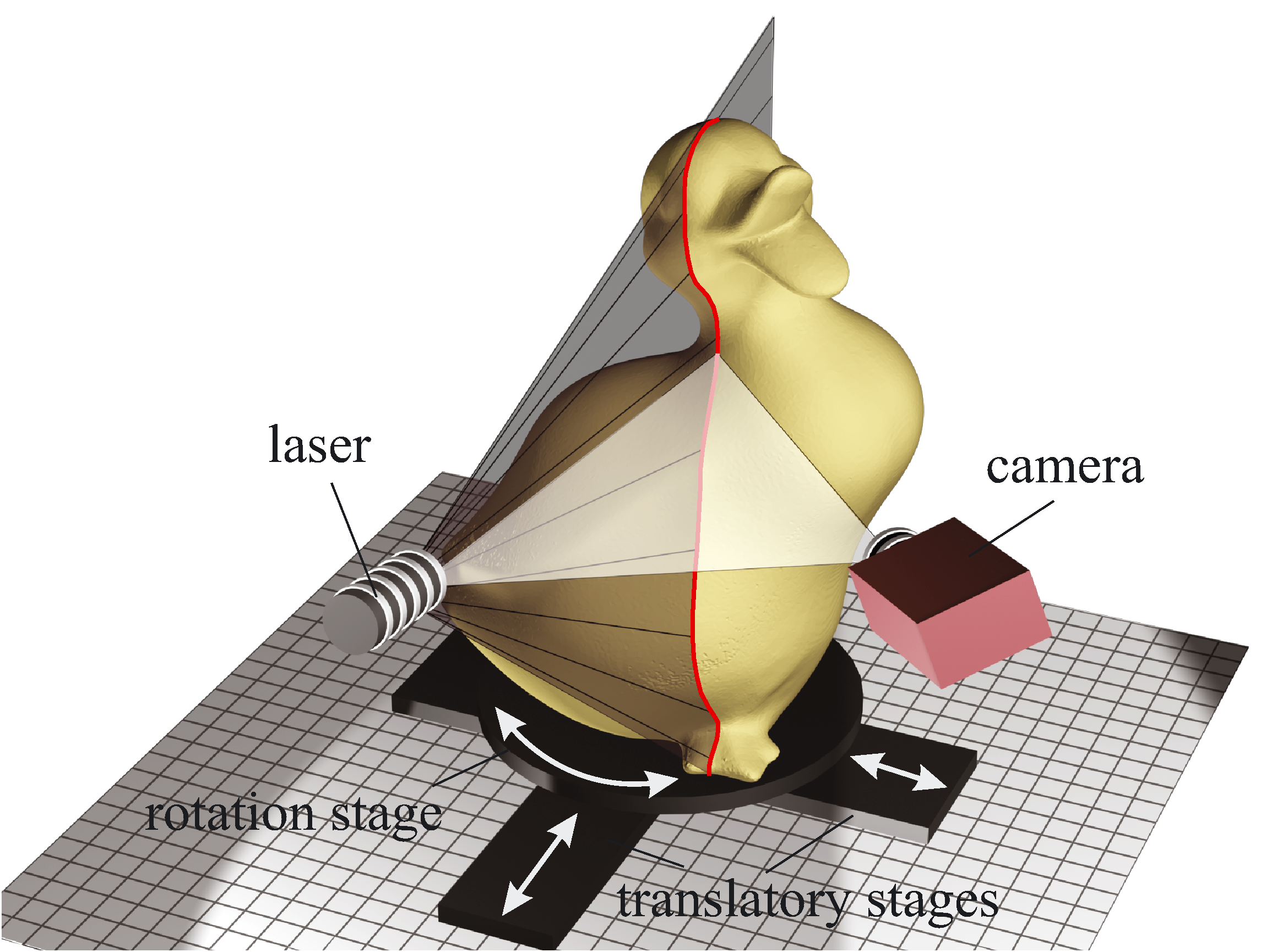
Acquisition from laser/ultrasound/contact
Mechanical contacts probe measurements from motorized systems
Approches based on time-of-flight computations (e.g. laser or
sonar rangefinder, …)
- measures the time taken by the pulse to be reflected off
the target and returned to the sender
- data = distance of the target from the source en a set of
directions. After reconstruction,

|

|
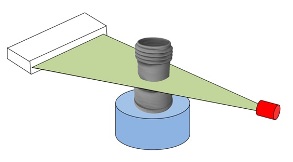
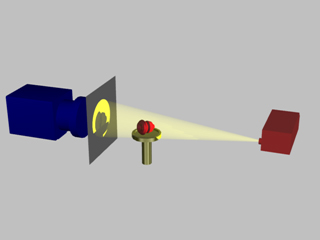
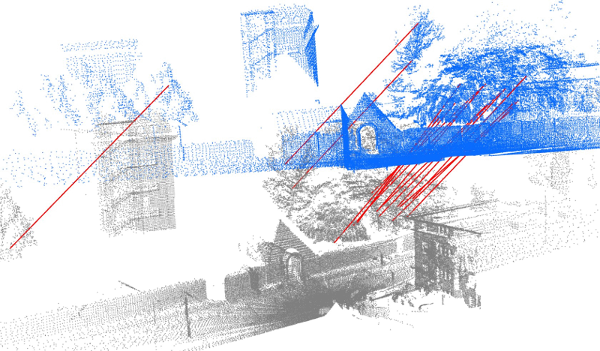
Reconstruction from triangulation principle
- Input: a pulse (or series of) is emitted from the source
- and observed if a detector (ex. laser + CCD)
- Relative position of the source and the detector is known
and thus
- From 2D positions in the detector,
- data = After calibration and reconstruction, a point cloud
|
|
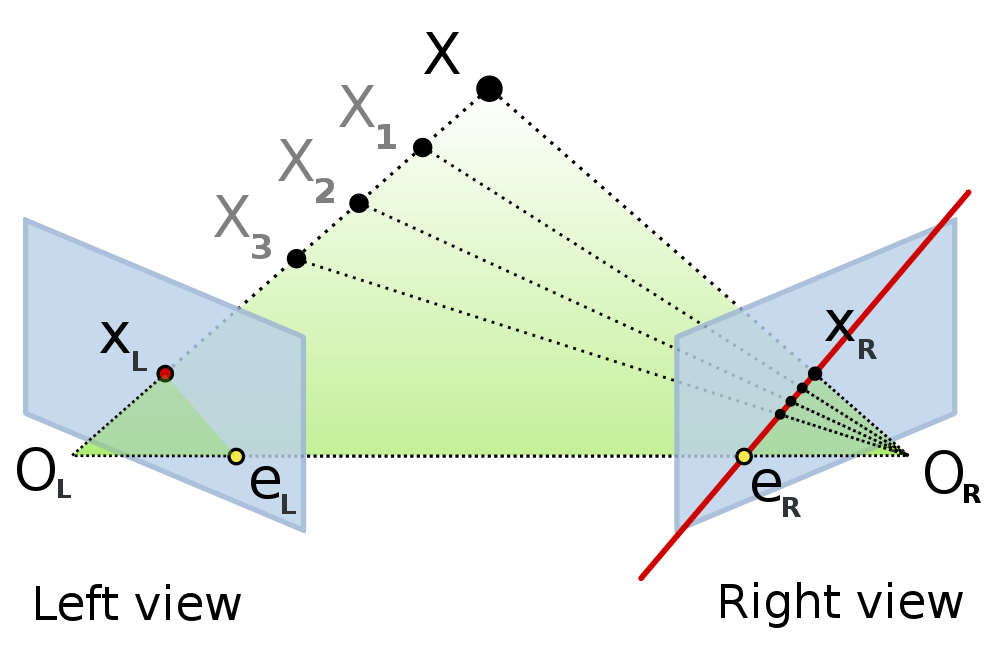
Reconstruction from images: example with Epipolar Geometry
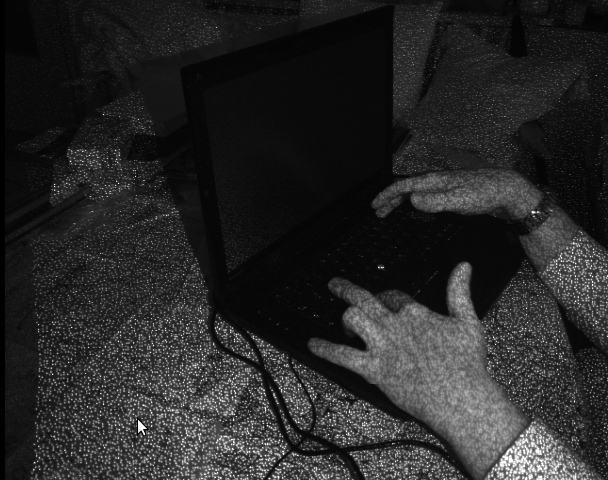
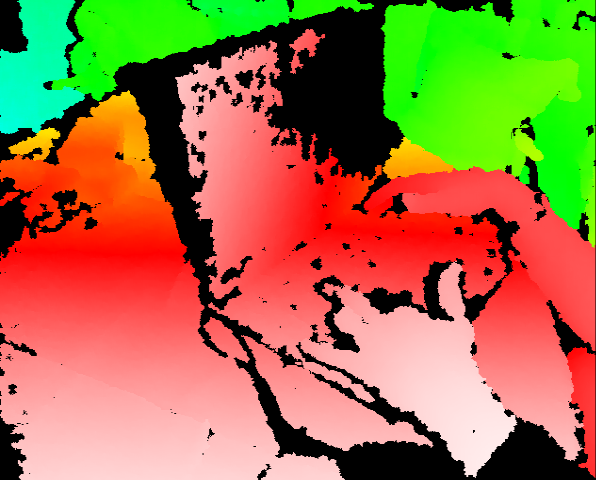
Hybrid approach: Kinect
- Color camera (CCD, 640x480)
- Pattern projection in infrared + CMOS detector (~640x480)
|

|
Raw data = Depth map in the detector plane + color image
Quiz: why infrared ?
Bottlenecks/Problems to consider
- Filtering (noise, outliers,…)
- Point cloud registration (by device calibration or from data processing)
- Local density control
- How to deal wit occluded regions ?
- …
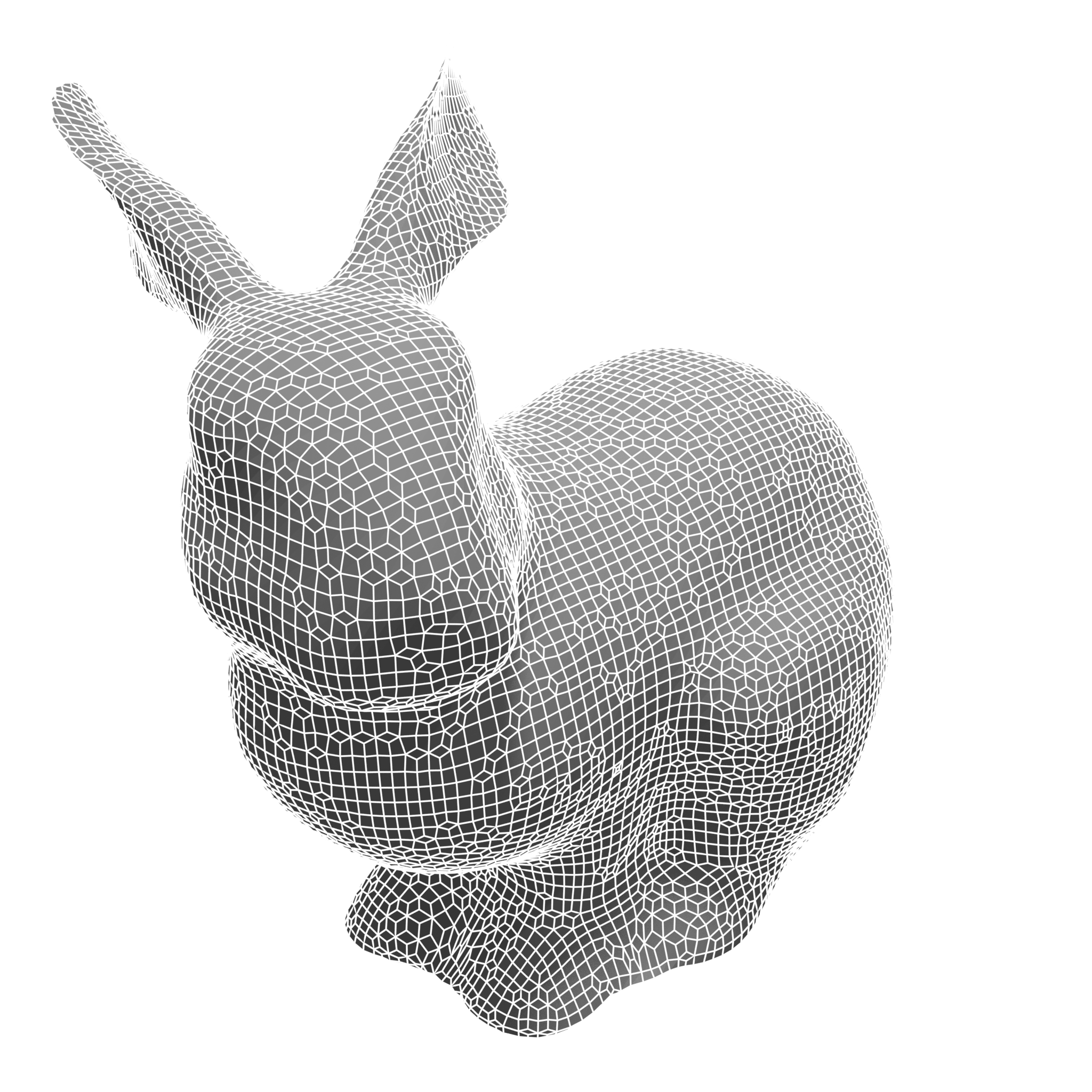
Bottlenecks/Problems to consider (bis)
Geometrical reconstruction define a high quality manifold
approximating or interpolating the point cloud.
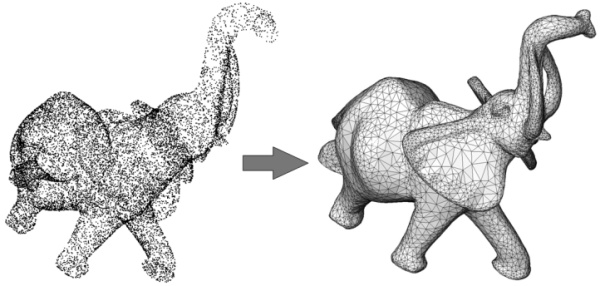
- Manifold cf later
- Quality
- distance to samples (which metric ? how to be robust to noise ?…)
- Smoothness of the reconstruction
- Geometrical and topological certificate of the reconstruction
- …
Some External Devices
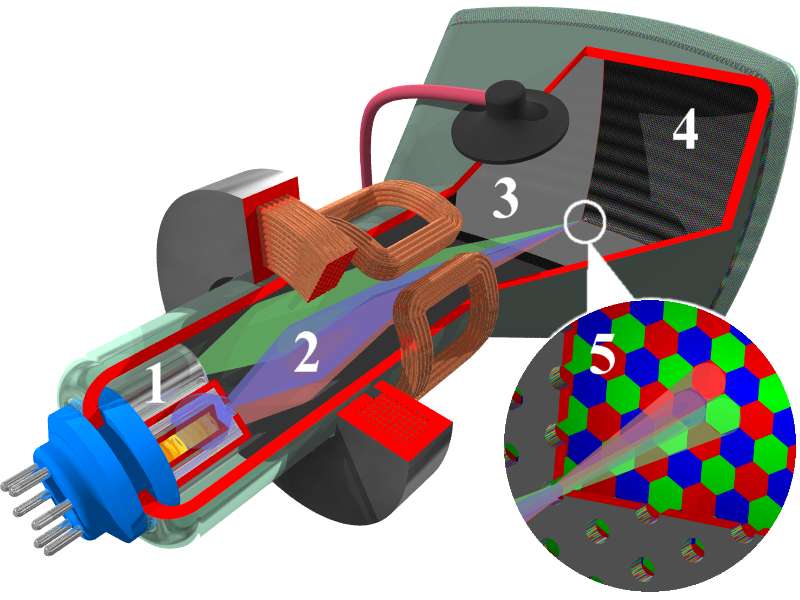
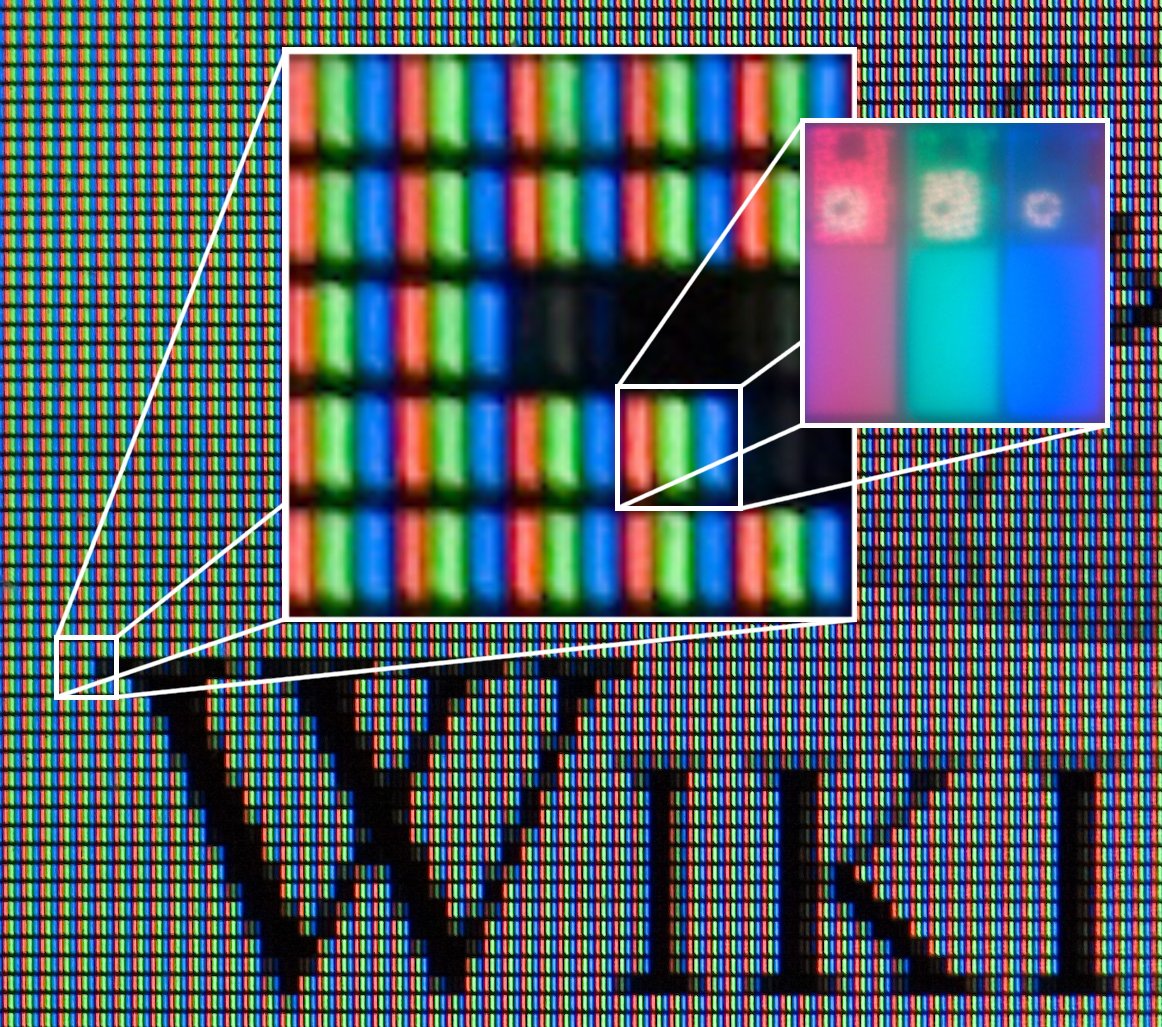
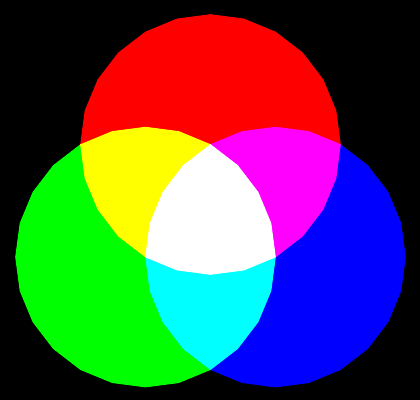
Raster Screens
Principles
- Luminophores with RGB cells (red, green, blue) to render colors
by additivity
- In our context
- Color image :
![[0..n]\times[0..m] -> Q^3](_images/math/1b1d7e44495ba22e25035d39cd16e05a7a06487b.png)
 : range of each color channel (8bits, 24bits, …)
: range of each color channel (8bits, 24bits, …)
Problems
- Rendering problem: geometrical models
 digital representations
digital representations
- ex: straight lines/circles drawing…
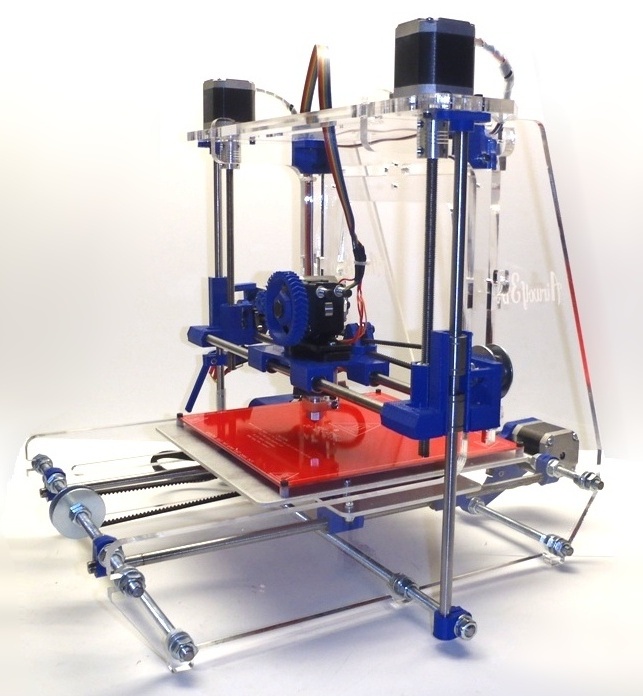
3D printers
Layer based
- Additive approach: material is added layer by layer
- Several technologies: heated plastic layers, stereolithography
(solidification of the polymer resin from ultra-violet beam), …
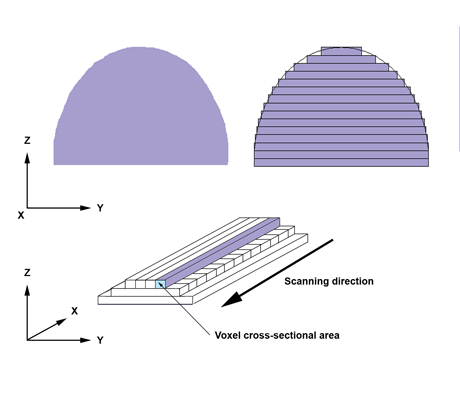
- Key point : slice based or discrete representation
 of the object to print
of the object to print
Problems
- Geometrical model layer based representaiton
- How to control the topology/surface orientation during the process ?
- Some geometrical analysis can be performed to enforce stability,
robustness, …
Topics Overview
(Very) Short (Subjective) Glossary
Image Processing (traitement et analyse d’images)
- General image related topic
- Image as the “realization” of a bi-directional signal
- keywords: image compression, filtering, denoising, color analysis, shape segmentation,…
Computer Vision (Vision par ordinateur, reconnaissance de formes,..)
- Focusing on object perception
- Keywords: Shape recognition, shape/image indexing and retrieval, 3D
reconstruction from images, …
(Very) Short (Subjective) Glossary
Computational Geometry
- Discrete data (point sets, simplicial complexes, …)
- Aim to first reconstruct structures and perform
geometrical/topological computations
- Certified computations
- Complexity
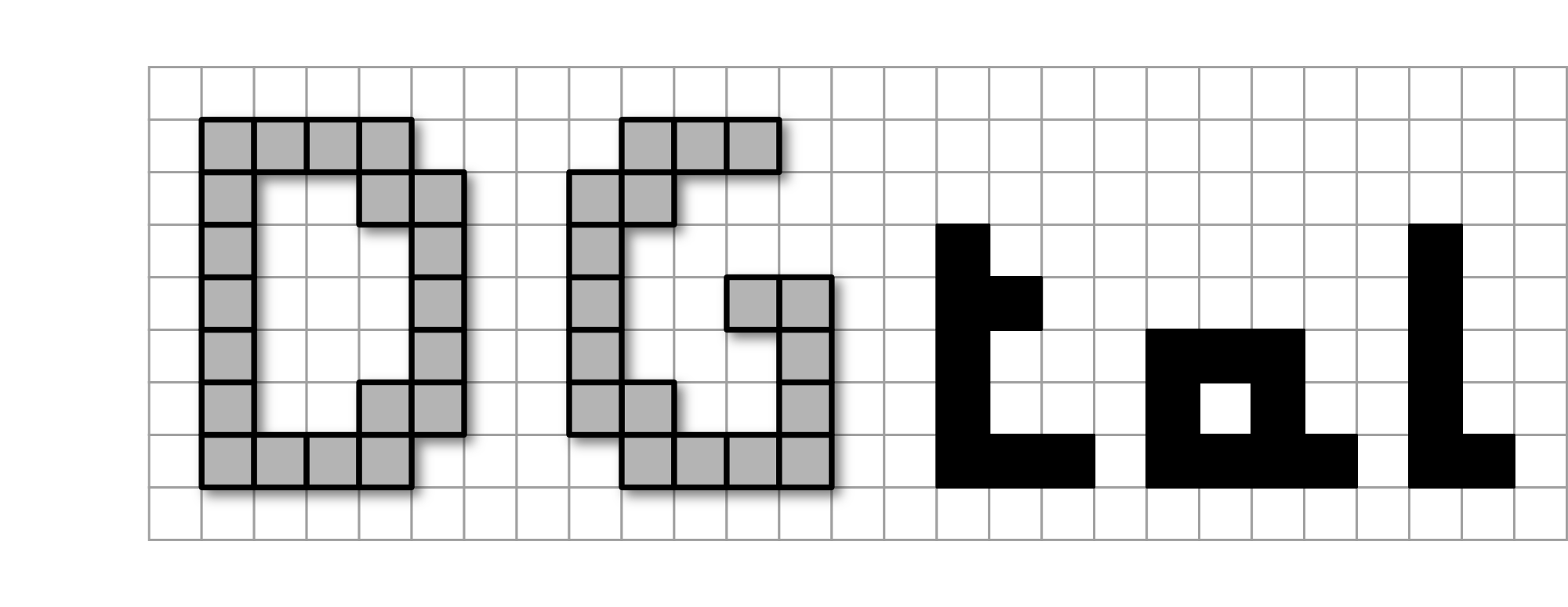
Digital Geometry
- We focus on discrete data defined on lattices (
 integer coordinates, arithmetical properties of objects…)
integer coordinates, arithmetical properties of objects…)
- Values are usually binary
- take geometrical/topological decisions from objects defined by
extension (vs. from properties)
(Very) Short (Subjective) Glossary
Geometric Modeling
- Model objects and complex geometrical scenes
- Procedural modeling, animation, …
Image Synthesis
- Image rendering from geometrical models + material properties +
Illumination models
- Ray shooting, radiosity, photon path tracing, ….
Overview of the course
TOC
Image Processing
- Image filtering
- Colorimetric (historgram) processing
- Mathematical morphology
- Segmentation
Digital Geometry
- Digital model and Digital topology
- Digital object surface analysis
- Volumetric processing
- Fast arithmetical transforms
Computational Geometry
- Geometrical predicates, convex hulls, Delaunay triangulations
- Spatial Data structures
- …


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}