Thèse : Algorithmes parallèles de simulation physique pour la synthèse d'images : application à l'animation de textiles (2000-2003)
Collaboration scientifique : Laboratoire GRAVIR-IMAG, équipe INRIA-iMAGIS, Grenoble.
Dirigée par :
- Mme Brigitte Plateau (ID-IMAG, professeur de l'INPG),
- M. Jean-Marc Vincent (ID-IMAG, maître de conférences de l'UJF),
- M. François Faure (iMAGIS-GRAVIR-IMAG, maître
de conférences de l'UJF).
Jury :
- Mme Marie-Paule Cani (présidente du jury / professeur de l'INPG / GRAVIR-EVASION / Grenoble),
- M. Serge Miguet (rapporteur externe / professeur de l'Université Lyon 2 / LIRIS / Lyon),
- M. Jean-Michel Dischler (rapporteur externe / professeur de l'ULP / LSIIT-IGG, Strasbourg),
- Mme Brigitte Plateau (examinateur (directeur de thèse) / professeur de l'INPG / ID-IMAG / Grenoble),
- M. Jean-Marc Vincent (examinateur (co-encadrant) / maître de conférences de l'UJF / ID-IMAG / Grenoble),
- M. François Faure (examinateur (co-encadrant) / maître de conférences de l'UJF / GRAVIR-EVASION / Grenoble).
Résumé de la thèse :
Problématique
En informatique graphique,
l'animation de textiles
constitue un axe de recherche particulièrement important
de par ses nombreuses applications dans le monde
industriel auprès des industries de la
confection et du tissage et grâce à son
application directe dans les jeux vidéos ou
encore dans les films d'animation, en
permettant notamment l'habillage de personnages virtuels.
Dans
le contexte industriel pour le développement
d'activités liées aux textiles, la simulation doit
impérativement être réaliste. C'est
pourquoi elle est basée sur une
modélisation physique de l'objet déformable
afin de reproduire au mieux son comportement. En effet, afin
d'obtenir un résultat réaliste, les lois
fondamentales de la physique comme la vitesse, les forces (gravitation,
vent, ...), les frottements, doivent être
utilisées pour modéliser le mouvement de
plusieurs objets interagissants. Les modèles
employés pouvant alors être
numériquement très
complexes, le calcul d'une
image de personnages varie de la seconde
à plusieurs minutes suivant leurs
complexités.
L'une des difficultés
principales réside donc dans l'obtention
d'animations interactives en temps réel,
c'est-à-dire dans la possibilité de calculer
25 images de la simulation de textiles par seconde en
autorisant des interactions de la part de l'utilisateur. De telles
simulations intéressent aussi bien les
industries du textile que celles du loisir. Au niveau
industriel, cette simulation intégrée aux logiciels de
Conception Assistée par Ordinateur (CAO) permettrait de
réduire considérablement les coûts de
mise au point en ayant un aperçu direct de
l'apparence d'un vêtement sans avoir à le retoucher.
A un niveau plus ludique, il est facile d'imaginer les
répercussions que cela aurait. Imaginez-vous
dans un monde virtuel et voyez le réalisme que
cela apporterait de se voir avec des vêtements ayant
un comportement semblable à la réalité
avec l'intégration de tous les mouvements des tissus
en réponse à vos propres mouvements. Ainsi, les
retombées concernent à la fois
l'industrie de la confection et du tissage, mais
également les applications de type
réalité virtuelle avec des défilés de mode
virtuels.
Afin de réaliser ces animations
interactives, tout en conservant la même complexité
de simulation pour des modèles de tailles importantes,
nous avons choisi de
diminuer les temps de
calcul en parallélisant les algorithmes
employés et en les exécutant ensuite sur une grappe de
machines.
Pour
atteindre l'objectif de ce travail de
recherche, plusieurs problèmes majeurs
étaient à résoudre. Tout
d'abord, de manière générale
dans le domaine du parallélisme, ce projet
de recherche a posé le problème des contraintes de
temps réel
et de leur implication sur l'architecture des
systèmes. En effet, dans le cadre d'une animation de
textiles, les temps d'exécution sont de l'ordre de
la minute, impliquant des tâches de
calcul de petites tailles et nécessitant par
conséquent un parallélisme à grain très fin.
Ensuite, dans le cadre plus
précis de la simulation d'objets
déformables, un point majeur à
résoudre résidait dans l'élaboration des calculs
dynamiques,
c'est-à-dire dans la réalisation des calculs du
mouvement du tissu au cours du temps.
Enfin, un autre point important à résoudre
concernait l'obtention des images issues de la
parallélisation
de la simulation. En effet, dans le domaine de
l'informatique graphique, une simulation en temps réel n'a
d'intérêt que si sa visualisation est
possible.
Collaborations
Afin de répondre à
l'ensemble de ces problèmes, ce travail de recherche, alliant calcul
haute performance, réalité virtuelle et informatique
graphique,
a fait l'objet d'une collaboration entre le
laboratoire d'Informatique et Distribution (ID-IMAG) et le
laboratoire GRAphisme, VIsion et Robotique (GRAVIR-IMAG), tous deux
localisés à Grenoble.
Par ailleurs, ce travail
a été partiellement financé par le contrat de
la thématique prioritaire n°4
"Sciences et technologies de l'information, outils et
applications" de la région Rhône-Alpes au travers du
projet SAPPE. Ce projet a été
réalisé dans le cadre d'une collaboration avec la
société Yxendis (Saint-Chamond), qui conçoit
et commercialise des produits logiciels pour
l'infographie textile, en vue d'un transfert de
technologie.
Architecture et environnement
parallèle
Dès
le commencement de ce travail de
recherche, l'architecture parallèle visée
était de type grappe de machines. Le choix
concernant l'utilisation d'une grappe
de machines plutôt qu'une machine
multi-processeurs dédiée telle
qu'un Cray est facilement
compréhensible. En effet, à l'heure
actuelle, il est beaucoup moins coûteux de
réunir plusieurs ordinateurs ordinaires que de
se doter d'une machine unique
multi-processeurs. Par ailleurs, une grappe
d'ordinateurs a l'avantage d'offrir une grande souplesse
d'évolution grâce à la
possibilité de rajouter à tout moment
des processeurs. Cette dynamicité de l'architecture
n'est, hélas, pas fournie par les machines
multi-processeurs. De plus, de nos jours, la grande majorité des
entreprises sont dotées à la fois
d'un réseau local et d'un parc
informatique conséquent. Il est
alors facile de maximiser les ressources
matérielles existantes en
employant par exemple ces machines la nuit en
tant que grappe de calcul, alors que d'ordinaire elles sont
inexploitées.
Afin d'exploiter au maximum les ressources
offertes par une grappe de machines, j'ai utilisé
l'environnement de programmation parallèle
Athapascan
développé au sein du
laboratoire Informatique et Distribution
(ID-IMAG) dans le cadre du projet
INRIA-APACHE. Le parallélisme au
sein de cet environnement est exprimé sous la
forme de tâches de calculs s'exécutant en
concurrence sur la machine parallèle
cible. L'emploi de cet environnement,
facilité par une interface
applicative de haut niveau, permet
d'assurer la portabilité des programmes
créés en autorisant, sans aucune
modification des programmes, une
exécution aussi bien séquentielle,
SMP (machines multi-processeurs) que
distribuée. Nous conservons
ainsi, au
travers de
la programmation, l'extensibilité
offerte initialement par la grappe de
machines.
Ce projet de recherche a ainsi permis de valider l'approche
de l'environnement de programmation parallèle
Athapascan,
en mettant notamment au point une application avec des
contraintes "temps réel", ainsi que
le contrôle dynamique de son ordonnanceur. En
effet, il faut savoir qu'au commencement de ma thèse
cet environnement était encore
en cours de recherche et de
développement par MM. Jean-Louis Roch, Thierry Gautier et
Rémi Revire (ID-IMAG, projet APACHE) et qu'il
n'avait été testé que sur une
application à gros grains de dynamique moléculaire,
nommée "Takakaw". Ainsi, tout au long de
ma thèse, j'ai travaillé en
étroite collaboration avec eux, en leur
faisant part des améliorations à
apporter à l'environnement pour obtenir
de meilleures performances dans le cadre d'une
application à grains fins : communications pas
assez réactives, graphe de
flots de données dupliqués sur
l'ensemble des noeuds,
surcoût important de l'ordonnancement,
contention du multi-threading, etc.
Au final, la
validation de l'environnement Athapascan a fait l'objet
d'une publication avec MM. Thierry Gautier et
Rémi Revire (cf. publications).
Modélisation physique et
parallélisation
Pour
modéliser les textiles, j'ai employé un
modèle physique de type masses-ressorts
basé sur une
discrétisation de l'objet en
particules. Ce modèle permet de décrire la
mécanique du textile en le discrétisant en un
ensemble de masses interagissants entre elles par
l'intermédiaire de ressorts plus ou moins complexes. La
formulation de l'équation du mouvement
associée à cet objet,
dictée par la loi fondamentale de la
dynamique, conduit alors à la
résolution d'un système d'Equations
Différentielles Ordinaires (EDO).
Au
final, les algorithmes conduisant à
la génération des images souhaitées
peuvent se décomposer selon la structure suivante :
- recherche des collisions possibles entre les objets de la scène,
- calcul d'une matrice représentant l'environnement global (positions des objets, forces, ...),
- résolution de systèmes linéaires pour la position des points, leur vitesse et leur accélération.
L'implantation
parallèle de ces calculs
dynamiques a nécessité
l'élaboration de
structures de données
précises pour la
parallélisation des algorithmes.
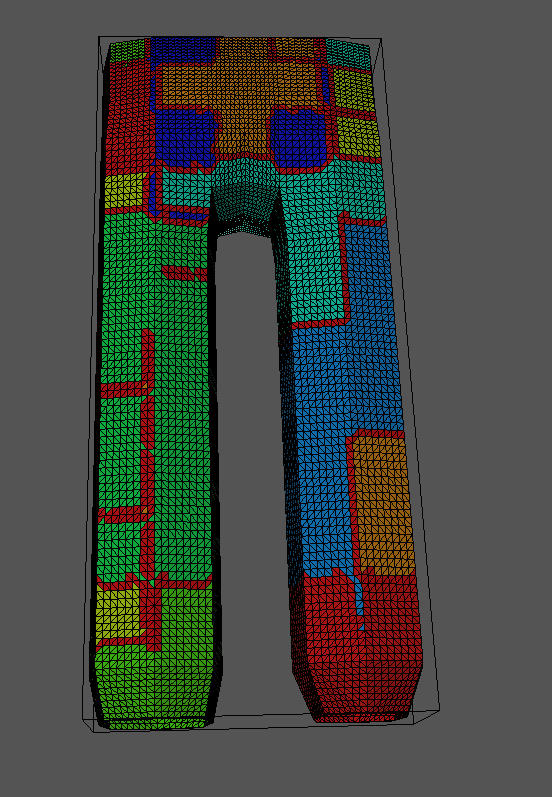
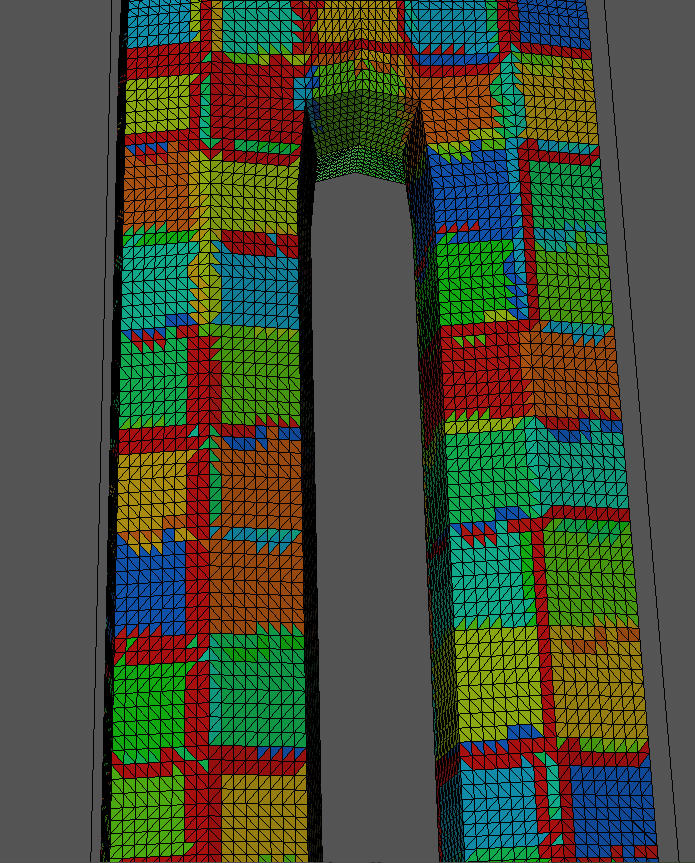
Notons tout d'abord que la
parallélisation est basée sur un partitionnement de l'objet en
sous-ensembles de particules,
la taille de ces sous-ensembles permettant
de définir la granularité de l'algorithme
parallèle. J'ai notamment effectué une
étude sur les différents
paramètres de la parallélisation,
résultant essentiellement de
la décomposition physique de l'objet, afin d'obtenir les
meilleures performances.
Par ailleurs, en employant ce partitionnement,
j'ai implanté en parallèle deux méthodes
d'intégration des équations du
mouvement
: la méthode explicite "leap-frog" et la
méthode d'Euler implicite. Dans le cadre de
l'intégration par la méthode d'Euler implicite, les
opérations les plus
coûteuses en calcul correspondent
aux résolutions de systèmes linéaires par
la méthode du gradient conjugué
impliquant notamment des opérations
d'algèbre linéaire de type multiplications de matrices
creuses et de vecteurs.
C'est pourquoi, afin d'effectuer ces opérations de
manière efficace, j'ai notamment
proposé une nouvelle structure de données
parallèle.
Couplage simulation numérique
parallèle / visualisation multi-écrans
Pour
effectuer la visualisation de l'application,
j'ai utilisé l'environnement de réalité
virtuelle Net Juggler
développé initialement au sein
du Laboratoire d'Informatique Fondamentale
d'Orléans (LIFO), dont le développement
s'est poursuivi au sein du laboratoire
ID-IMAG. Cet environnement
permet notamment une visualisation de
l'application sur plusieurs écrans en tirant parti des
cartes graphiques disposées sur une grappe de machines.
L'emploi
de cet environnement a imposé la
réalisation d'un couplage entre la simulation
parallèle et la visualisation. J'ai ainsi implanté deux
modules distincts, une simulation parallèle de
textiles et une visualisation multi-écrans, que
j'ai ensuite couplés en les faisant communiquer
efficacement à l'aide de sockets et de primitives de
diffusion MPI (Message Passing Interface).
L'intérêt d'une telle combinaison peut
permettre, à terme, une meilleure
compréhension de simulations de phénomènes
très complexes nécessitant de gros volumes de
données dont la visualisation n'était pour le moment pas
réalisable sans l'utilisation de machines fort coûteuses
telles que des Silicon Graphics.
Du point de vue
scientifique, l'étude d'algorithmes parallèles pour la
synthèse d'animations a impliqué un nouveau regard
sur le domaine. En effet, la distribution des calculs sur une grappe de
multi-processeurs et les délais inévitablement
variables de récupération des résultats
ont remis en cause l'approche synchrone
utilisée jusqu'alors en synthèse
d'animations. J'ai donc
implanté un modèle totalement
asynchrone
dans lequel les sous-ensembles (simulation
parallèle, affichage,
interaction) peuvent
être exécutés indépendamment
en l'absence d'actions synchronisées. Cette
approche parallèle, encourageant le
développement d'algorithmes asynchrones, peut ainsi
permettre le déploiement d'applications de type
serveurs d'animations capables de
gérer efficacement un monde
virtuel multi-utilisateurs.
Ce modèle
asynchrone a fait l'objet de
différentes publications réalisées
notamment avec les concepteurs de Net Juggler, MM.
Bruno Raffin et Jérémie Allard, qui avaient
également testé ce couplage en
implantant en MPI une simulation parallèle de
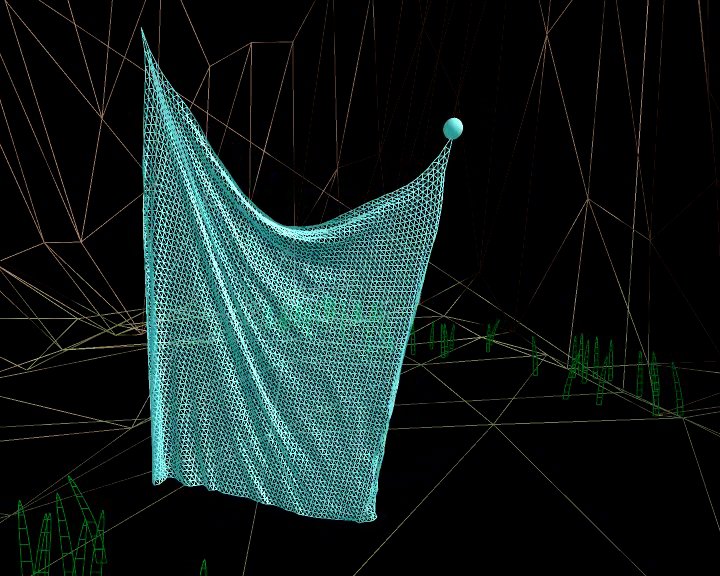
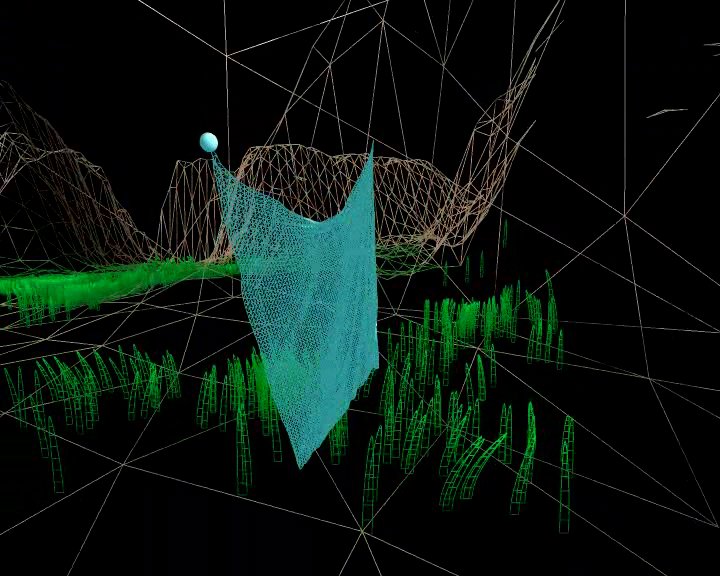
fluides. Au final, nous avons réalisé une
démonstration visualisée sur plusieurs écrans,
nommée "démo valley", intégrant à
l'intérieur d'un décor 3-D d'une vallée, leur
simulation interactive de fluides écrite en MPI, ma
simulation interactive de textiles écrite en
Athapascan, avec une simulation de prairie implantée
par MM. François Faure et Franck Perbet
(EVASION-GRAVIR). L'utilisateur peut alors naviguer dans ce
monde virtuel via un lapin dont les effets
de fourure ont été
réalisés par M.
Jérémie Allard en surperposant
plusieurs couches transparentes de
textures. Cette démonstration est
visible sur la plate-forme GrImage de
l'INRIA Rhône-Alpes.
Il est à
noter que le couplage entre la simulation
parallèle et l'environnement multi-écrans
ouvre un nouveau domaine de recherche
concernant la gestion efficace du flux entre applications
parallèles
de type simulation numérique
et réalité virtuelle, permettant
la construction d'applications
interactives complexes traitant de gros volumes de
données. Ce travail de recherche m'a ainsi permis
d'appréhender les divers problèmes
liés aux contraintes de temps réel
et au couplage d'une visualisation interactive
sur une simulation numérique.
Réalisations
logicielles
Mon
travail de thèse a abouti
à une plate-forme permettant d'effectuer
une simulation de textiles en parallèle
pouvant être visualisée sur plusieurs
écrans. Actuellement, le prototype que j'ai
réalisé, d'environ 20 000 lignes de code C++ en
Athapascan, permet d'effectuer une simulation en parallèle
d'environ un million de particules sur
une grappe de 200 PCs avec une
visualisation sur 3 autres PCs.
Perspectives
A court terme, il faudrait également ajouter à cette simulation de textiles les phases de détection et de traitement des collisions du tissu avec lui-même ou avec des objets extérieurs. Pour la phase de détection, il est nécessaire de prendre en compte les aspects géométriques des objets contenus dans la scène. Les algorithmes proposés à l'heure actuelle sont généralement basés sur des hiérarchies de boîtes englobantes. Dans notre situation, il est facile d'ajouter une boîte englobante à chaque bloc de particules issu du partitionnement du tissu initial. Une structure hiérarchique des boîtes serait ensuite superposée. Le point prometteur est que la hiérarchie des boîtes pourrait être couplée à l'ordonnanceur dynamique. Ainsi, la gestion des collisions pourraient être améliorée par le fait que les boîtes "voisines" dans l'espace de l'objet géométrique seraient traitées sur des processeurs "voisins".
Puis le traitement des collisions pourra s'effectuer par l'ajout de nouveaux ressorts entre les particules. Cet ajout va modifier quelque peu les matrices des contributions des forces. Mais ces modifications n'affectent en rien les propriétés de ces matrices qui sont symétriques et creuses. Elles n'ajoutent en effet qu'un nombre limité d'interactions locales aux particules. Ces changements vont alors engendrer des modifications du graphe de flot de données associé à l'application. Mais ce dernier étant régénéré à chaque itération de la simulation, ces changements devraient être relativement transparents.
Il resterait alors à valider cette hypothèse remettant en avant le compromis entre le découpage de l'espace de simulation et celui de l'espace objet. La mise au point dépendra alors du "degré de collisions" observé dans la scène par rapport aux tailles des objets manipulés.
Par ailleurs, il serait également intéressant d'améliorer le partitionnement en utilisant une librairie de partitionnement de graphe telles que Scotch (développée au LaBRI) ou Metis et d'utiliser la couche de communication FlowVR développée au sein du laboratoire ID-IMAG et du LIFO pour améliorer l'efficacité des communications établies entre les différents modules : simulation parallèle, visualisation, interactions et collisions.
Enfin, afin d'exploiter au maximum les ressources disponibles sur une plate-forme couplant des noeuds de calculs avec des noeuds de rendu, il faudrait également paralléliser la phase de rendu de la simulation de textiles.
Pour finir, l'objectif final serait de réaliser la visualisation de plusieurs mannequins virtuels portant des habits de manière réaliste, en intégrant tous les mouvements des tissus en réaction aux mouvements du mannequin virtuel.