Biography
Associate Professor - Accredited to supervise research
- LyonTech-la Doua - Nautibus, 23-25 Av. Pierre de Coubertin, F-69100 Villeurbanne Cedex
- +33 4 72 43 19 75
Associate Professor - Accredited to supervise research

Our aim is to simulate the movement of soft bodies in interaction. The simulations are coupled to physical device to enable interaction between users and the 3D simulations. The difficulty is to propose efficient models and parallel algorithms on the GPU of simulation to achieve interactive execution time. One direct application is to develop a new kind of training simulators for medical gestures.
Inferior Alveolar nerve block (IANB) is a complex procedure requiring precise mentalization and is currently taught using costly single-use devices, limiting training effectiveness and leading to high novice failure rates. The IDEAL (Improved learning environment for dental anaesthesia) project seeks to enhance learning through a multidisciplinary approach involving didactics, clinical practice, computer graphics, robotics, and a simulator company. It aims to develop 3 innovative simulation-based tools with haptic interfaces, enabling visualization of anatomical deformations and tactile feedback. IDEAL also explores mentalization, learning through error, and performance links. In mechatronics, the goal is to simulate both rigid and soft anatomical structures realistically and stably, while enabling real-time gesture assessment and managing computation frequencies between simulation and haptics.
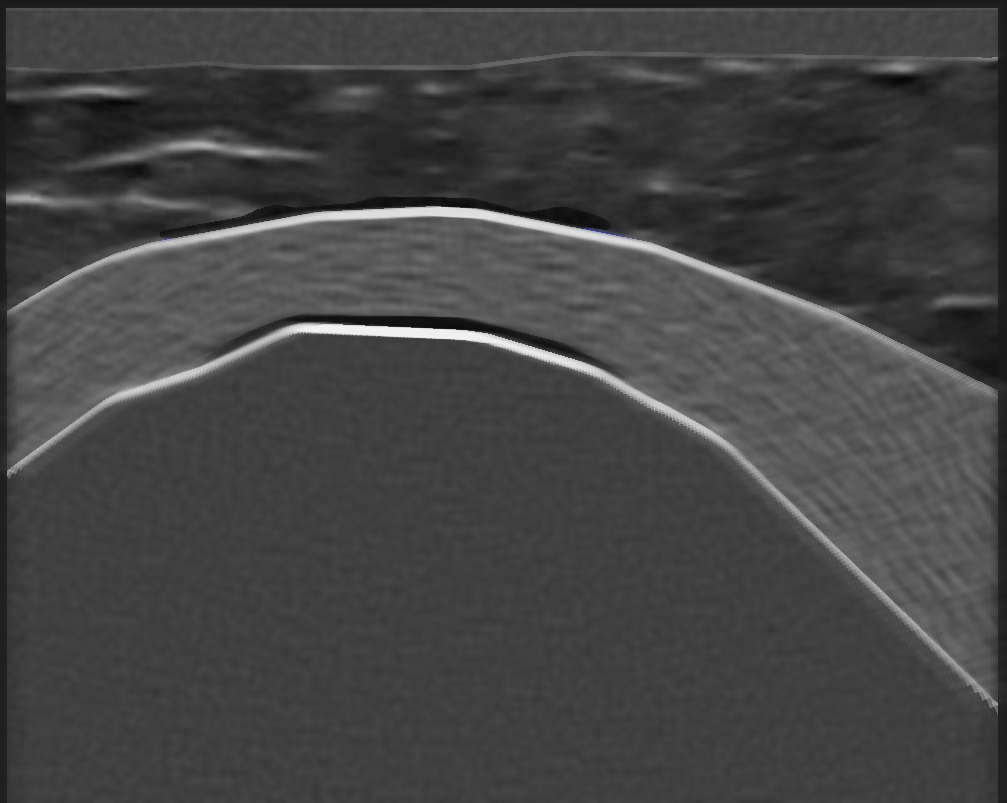
To know more: IDEAL project website (ANR-25-CE38-5557)The gesture of the puncture of large joints has evolved over the last ten years with the use of an ultrasound probe to better guide the insertion of the needle during the operation. The main difficulty in the realization and the learning of this gesture resides thus in the simultaneous manipulation of two instruments. It is necessary to know how to manipulate the ultrasound probe (to visualize the gesture performed on a remote screen) while inserting the needle into the joint. These two instruments can also be interchanged during the puncture, making the operation all the more delicate. The objective of the SPARTE project is thus the realization of a simulator learning the gesture of the puncture of large joints under ultrasound in order to allow learning of the gesture without risk for the patient.
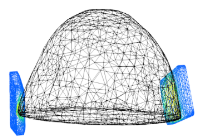
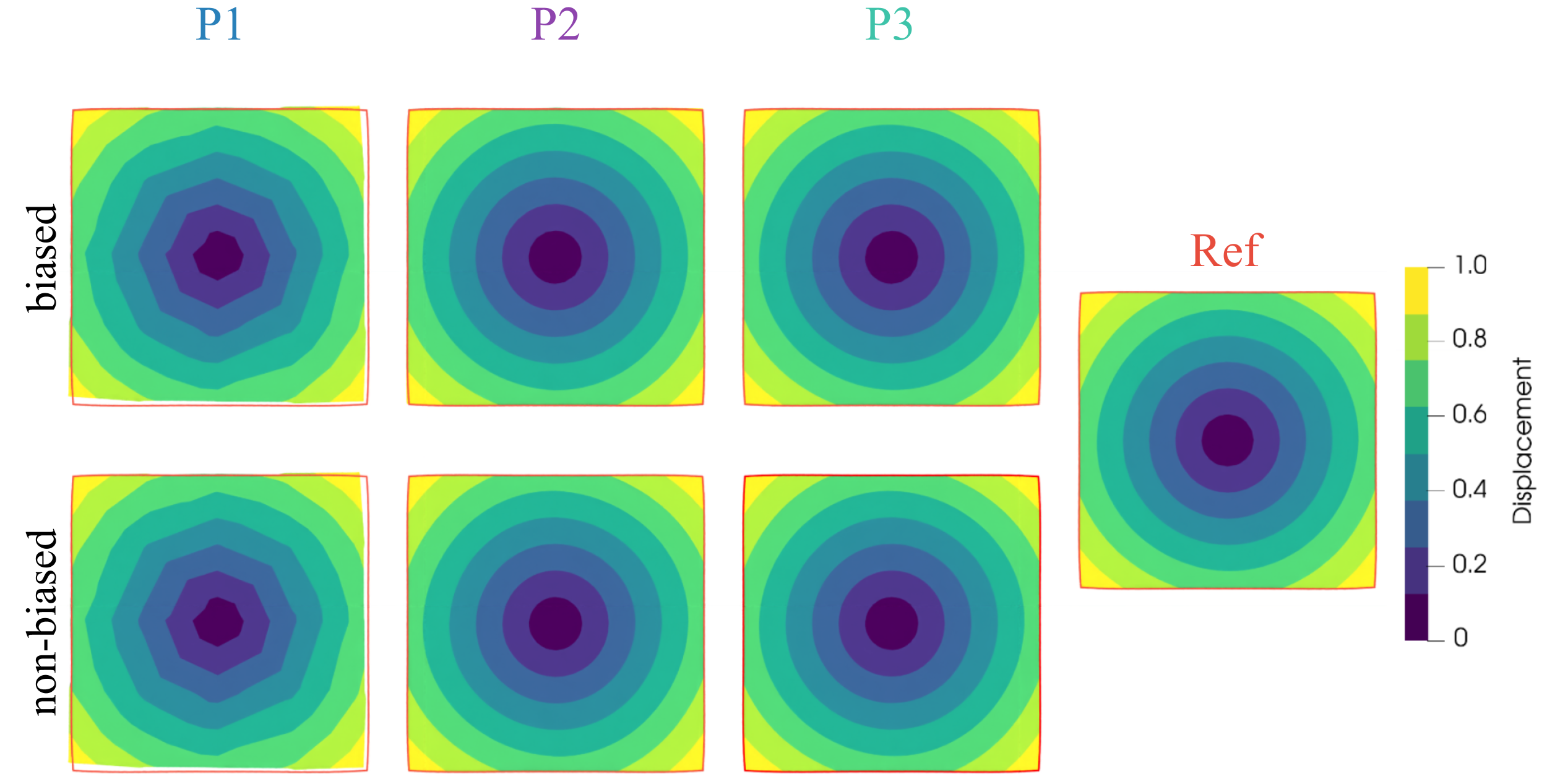
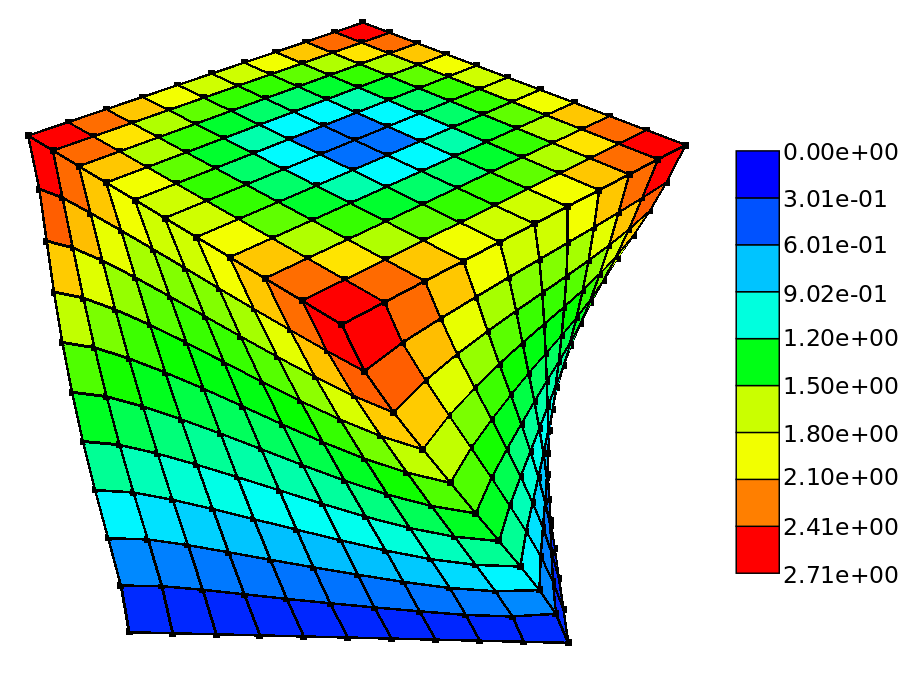
Obstetricians learn the medical gesture of childbirth during actual deliveries. This learning becomes difficult in the case of instrumental deliveries where the dexterity of the gesture is necessary. The use of a simulator, allowing a first formation of this gesture without risk for the parturient and the fetus, would thus complement the training of young obstetricians. This simulator must restore the sensations experienced by the obstetrician, while taking into account parameters such as the morphology of the parturient and that of the fetus. This simulator, based on the techniques of Virtual Reality, requires the definition of a complete biomechanical model of the female reproductive system during childbirth, as well as the calculation of the forces generated by the Descent of the fetus.
A first work of research (thesis of Romain Buttin) allowed the realization of a bio-mechanical model, based on the finite element method, allowing simulation of the behavior of the organs involved during childbirth (uterus, maternal abdomen , Soft pelvis and bone) in contact with the fetus. This simulation thus makes it possible to obtain the trajectory of the fetus during its descent and its release.
Keywords: physical simulation, soft tissue biomechanical modeling, parallel simulation
Visualization of 4D data from simulation of particle or plasma beams
Keywords: big data, wavelet compression, 4D data
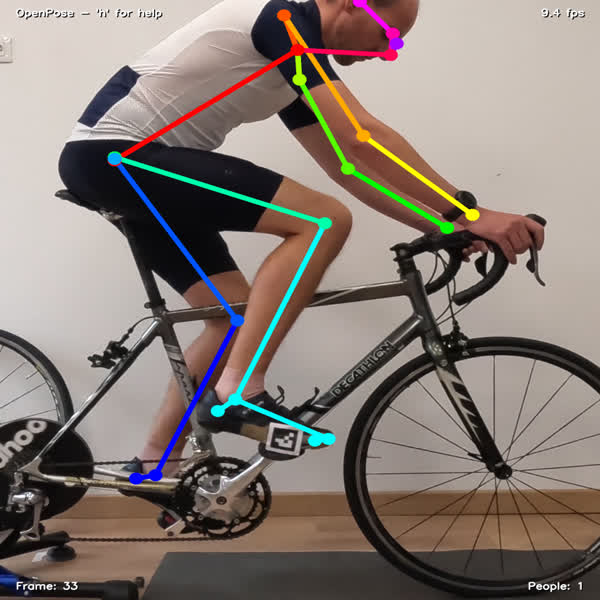 |
Benchmark temps réel des modèles de reconstruction 2D pour le cyclisme stationnaire : comparaison précision / stabilité temporelle / temps d'inférence sur postures cyclistes spécifiques
P. Rivière, F. Zara, N. Pronost Groupe de Travail Animation et Simulation - GTAS 2026, July, 2026, Lyon, France. |
 |
Breaking the 3D Dataset Bottleneck: Fast Scalable Generation of Aligned 3D Assets from Scratch for Category 6D Pose Estimation and Robotic Grasping
G. Duret, D. Mazurak, F. Zara, J. Peters, L. Chen IEEE ICRA 2026 Workshop Synthetic Data for Robot Learning, June, 2026, Vienna, Austria. Already published work. |
 |
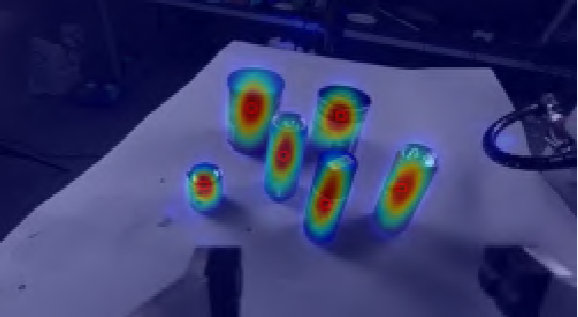
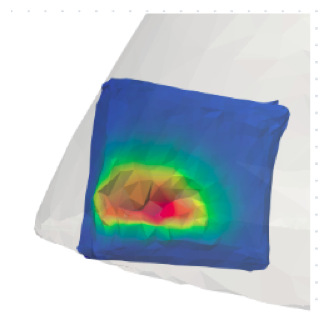
Automatic Physically-Based Sim2Real for Tactile Images through Differentiable Path-Tracing Rendering
G. Duret, A. Samsonenk, F. Zara, J. Peters, L. Chen IEEE ICRA 2026 Workshop ViTac, June, 2026, Vienna, Austria. Already published work. |
 |
Real-Time Simulation of Deformable Tactile Sensors and Objects in Robotic Grasping using Graph Neural Networks with Inductive Biases
G. Duret, F. Heller, D. Mazurak, T. Schneider, A. Kshirsagar, F. Zara, J. Peters, L. Chen IEEE ICRA 2026 Workshop ViTac, June, 2026, Vienna, Austria. Already published work. |
|
|
Breaking the 3D Dataset Bottleneck: Fast Scalable Generation of Aligned 3D Assets
from Scratch for Category 6D Pose Estimation and Robotic Grasping
G. Duret, D. Mazurak, F. Zara, J. Peters, L. Chen IEEE/CVF Conference on Computer Vision and Pattern Recognition 2026 (CVPR 2026), June 3-7, 2026, Denver CO, United-States. |
 |
Automatic Physically-Based Sim2Real for Tactile Images through Differentiable
Path-Tracing Rendering
G. Duret, A. Samsonenko, F. Zara, J. Peters, L. Chen IEEE International Conference on Robotics and Automation (ICRA 2026), June 1-5, 2026, Vienna, Austria. |
 |
Real-Time Simulation of Deformable Tactile Sensors and Objects in Robotic
Grasping using Graph Neural Networks with Inductive Biases
G. Duret, F. Heller, D. Mazurak, A. Kshirsagar, T. Schneider, F. Zara, J. Peters, L. Chen 9th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2026), Kanazawa, Japan, April 2026. |
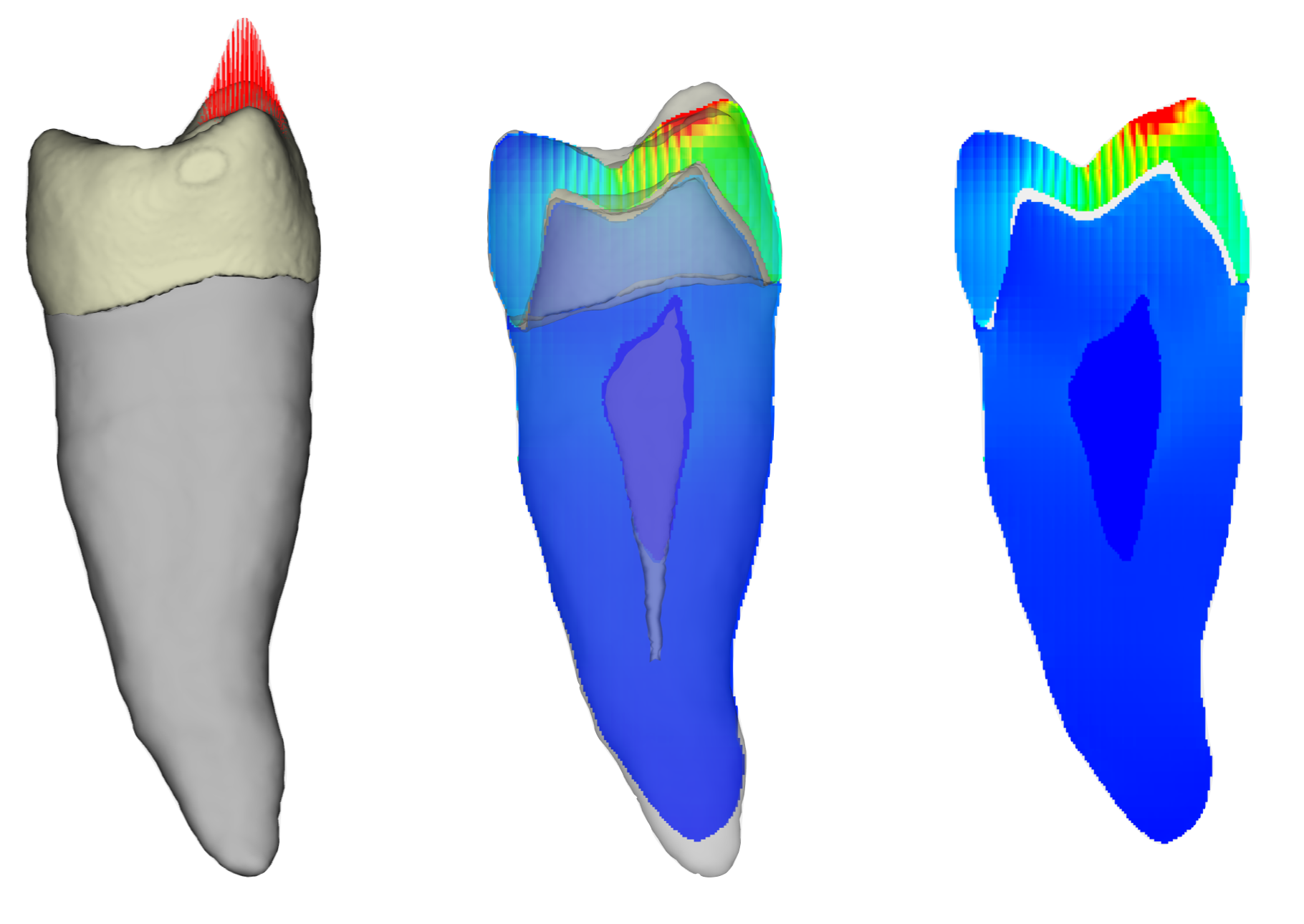 |
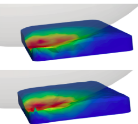
Deep-Learning-Based Prediction of Occlusal Stresses on Teeth
D. Ajmi, M. Ducret, B. Gilles, R. Richert, F. Zara Working paper, December, 2025. |
 |
Real-Time Simulation of Deformable Tactile Sensors in Robotic Grasping using
Graph Neural Networks
G. Duret, D. Mazurak, F. Heller, F. Zara, J. Peters, L. Chen IROS 2025 Workshop Tactile Sensing, China, October, 2025. |
 |
Breaking the 3D Dataset Bottleneck: Fast Scalable Generation of Aligned 3D Assets
from Scratch for 6D Pose Estimation and Robotic Grasping
G. Duret, D. Mazurak, F. Zara, J. Peters, L. Chen Working paper, 2025. |
 |
Facilitate and scale up the creation of 3D meshes and 6D category-based datasets
with generative models: GenVegeFruits 3D
G. Duret, Y. Bourennane, D. Mazurak, A. Samsonenko, F. Zara, L. Chen, J. Peters IEEE International Conference on Image Processing (ICIP 2025), Alaska, September, 2025. |
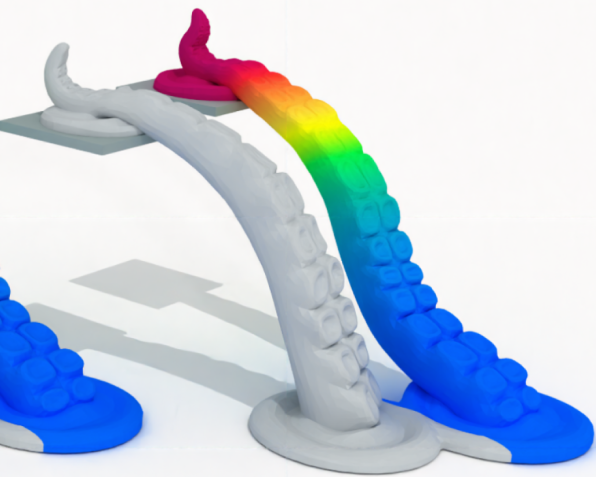 |
Going further with Vertex Block Descent
B. Saillant, F. Zara, F. Jaillet, G. Damiand CASA 2025 (Computer Animation and Social Agents), Strasbourg, France, June, 2025. Special Issue paper in Computer Animation and Virtual Worlds, volume 36, issue 3, May/June, 2025. |
 |
Chap 8: Haptic Training Simulators in medical education
F. Zara, L. Maréchal, R. Chalard, R. Moreau, L. Vadcard, C. Barthod. A. Lelevé Robot Design: Application To Medical Robotics, Med Amine Laribi, Carl Nelson (Editors), Elsevier (Publisher), 2025. |
 |
FruitBin: a tunable large-scale dataset for advancing 6D pose estimation
in fruit
bin-picking
automation
G. Duret, M. Ali, N. Cazin, D. Mazurak, A. Samsonenko, A. Chapin, F. Zara, E. Dellandrea, L. Chen, J. Peters 9th International Workshop on Recovering 6D Object Pose (R6D), organized at European Conference on Computer Vision - ECCV 2024, September 2024, Milan (Italy). |
 |
High-Order Elements in Position Based Dynamics
B. Saillant, F. Zara, F. Jaillet, G. Damiand The Visual Computer, CGI 2024 (Computer Graphics International), Geneva (Suisse), July, 2024. |
 |
Toward synthetic data generation for robotic tactile manipulations
G. Duret, F. Zara, J. Peters, L. Chen Workshop on "Robot Embodiment through Visuo-Tactile Perception" - 2024 IEEE International Conference on Robotics and Automation (ICRA) Conference Workshop, Yokohama (Japon), May 2024. |
 |
Haptic Training Simulators Design Approach
F. Zara, B. Delbos, R. Chalard, R. Moreau, F. Jaillet, A. Lelevé Smart Multimedia 2024, Los Angeles (US), March 2024. |
 |
FruitBin: a large-scale fruit bin picking dataset tunable over occlusion,
camera pose and
scenes for 6D pose estimation
G. Duret, M. Ali, N. Cazin, A. Chapin, F. Zara, E. Dellandréa, J. Peters, L. Chen, December 2023. |
 |
PickSim: A dynamically configurable Gazebo pipeline for robotic
manipulation
G. Duret, N. Cazin, M. Ali, F. Zara, E. Dellandréa, J. Peters, L. Chen Advancing Robot Manipulation Through Open-Source Ecosystems - 2023 IEEE International Conference on Robotics and Automation (ICRA) Conference Workshop, London (UK), May 2023. |
 |
Chap 15: Numerical simulation of vaginal delivery
F. Zara Biomechanics of Female Reproductive System, Breast and Pelvic floor - From Model to Patient, Mathias Jean Brieu, Michel Cosson, Poul Fonss Nielsen (Book Editors), Elsevier (Publisher), August 2023. |
 |
Simulation temps réel d'insertion d'aiguille sous
échographie. B. Saillant , F. Jaillet, F. Zara. Journées Françaises d'Informatique Graphique (JFIG 2022), 23-25 novembre 2022, Bordeaux (France). |
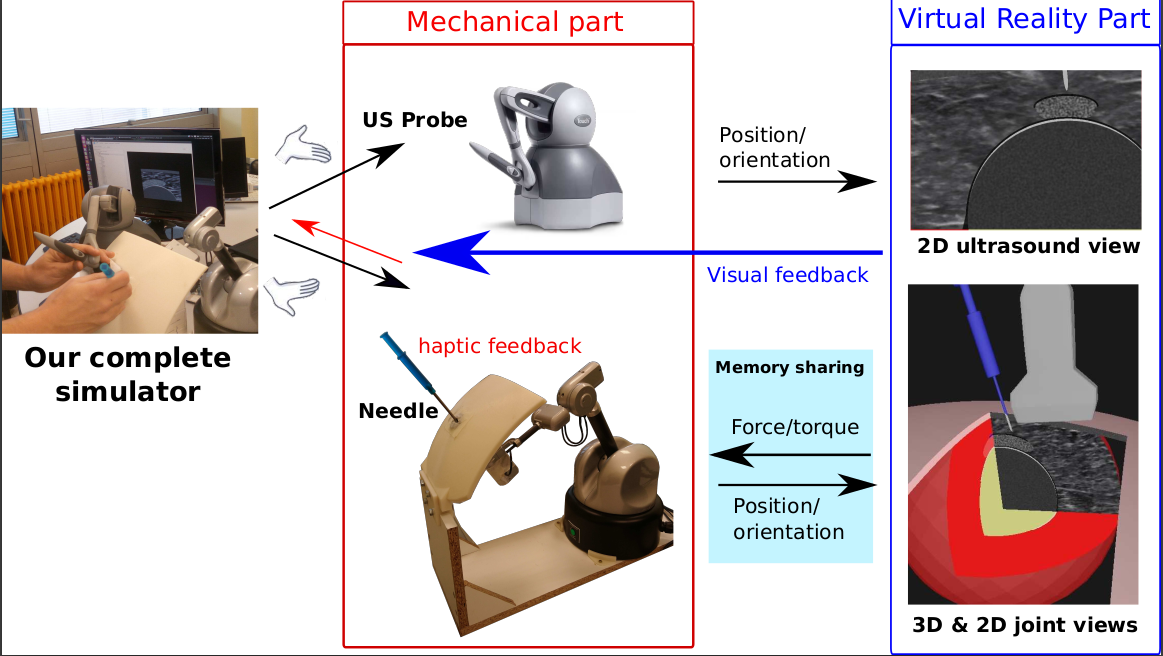 |
A Virtual Reality
and haptic
simulator for ultrasound-guided needle insertion. M. Alamilla, C. Barnouin, R. Moreau, F. Zara, F. Jaillet, T. Redarce, F. Coury. IEEE Transactions on Medical Robotics and Bionics, May, 2022. |
 |
Simulation
interactive d'objets
déformables pour la conception de simulateurs d'apprentissage
aux gestes
médicaux-chirurgicaux. F. Zara. Habilitation à Diriger les Recherches (HDR), defended on October 19th, 2020. |
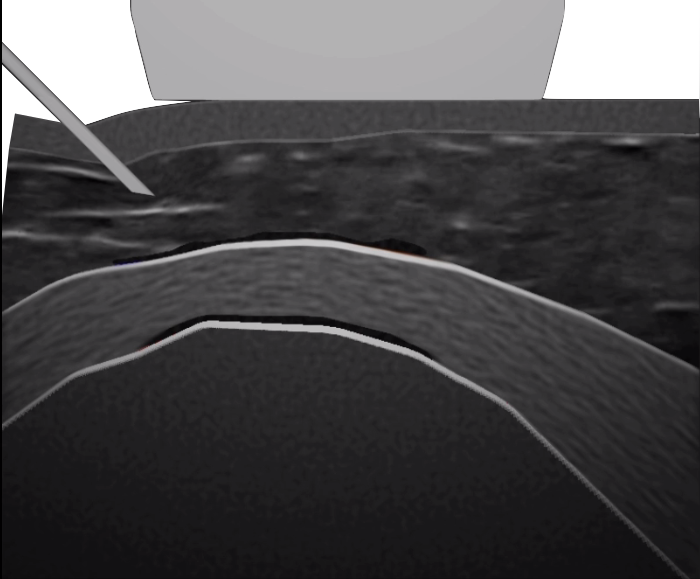 |
A
real-time ultrasound rendering with model-based tissue deformation
for needle
insertion. C. Barnouin, F. Zara, F. Jaillet. 15th International Conference on Computer Graphics Theory and Applications, GRAPP 2020, Malta, february 2020. |
|
Merge-and-simplify
Operation for
Compact Combinatorial Pyramid Definition. G. Damiand, F. Zara. Pattern Recognition Letters, vol. 129, pp. 48-55, january 2020. |
|
Hybrid
3D Mass-Spring System for simulation of isotropic materials with any
Poisson's
ratio. K. Golec, J.-F. Palierne, F. Zara, S. Nicolle, G. Damiand. Visual Computer, volume 36, numéro 4, pages 809-825, may 2019 (issue date: April 2020). |
 |
Real-time Ultrasound Rendering for Ultrasound-Guided Puncture
Training. C. Barnouin, F. Zara, F. Jaillet. Journées Françaises d'Informatique Graphique (JFIG 2018), 16 novembre 2018, Poitiers (France). |

|
Distributed Combinatorial Maps for Parallel Mesh Processing. G. Damiand, A. Gonzalez-Lorenzo, F. Zara, F. Dupont. Open Access Revue Algorithms, volume 11, issue 7, numéro 105, 2018. |

|
Simuler en temps réel la descente du foetus. F. Zara. Revue Quadrature, numéro 107, pages 34-46, EDP Sciences, Janvier-février-mars 2018. |