Master 2 Image Développement et Technologies 3D
UE Animation, Corps
Articulés et Moteurs Physiques Contenu de l'UE ACAMP
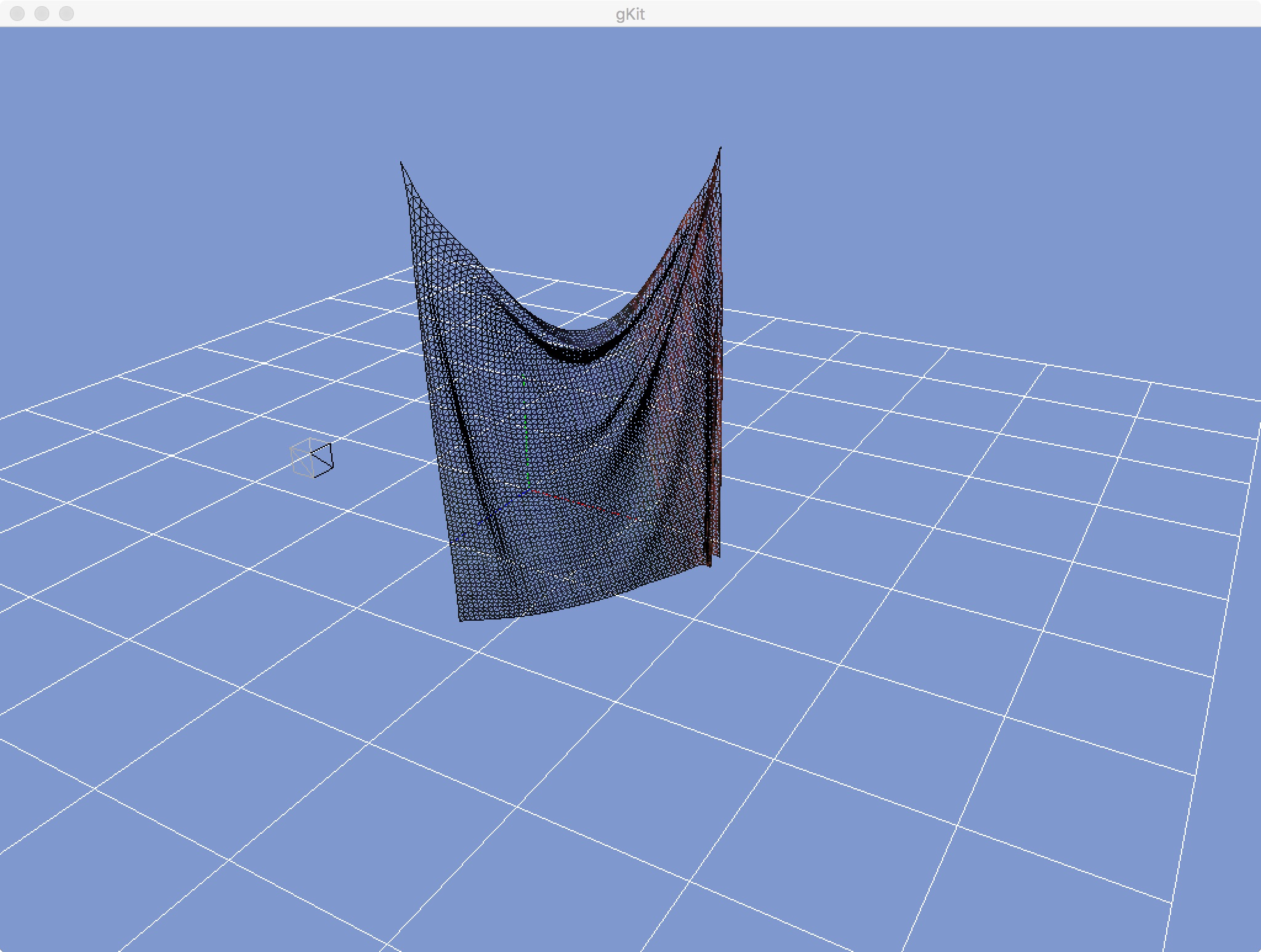
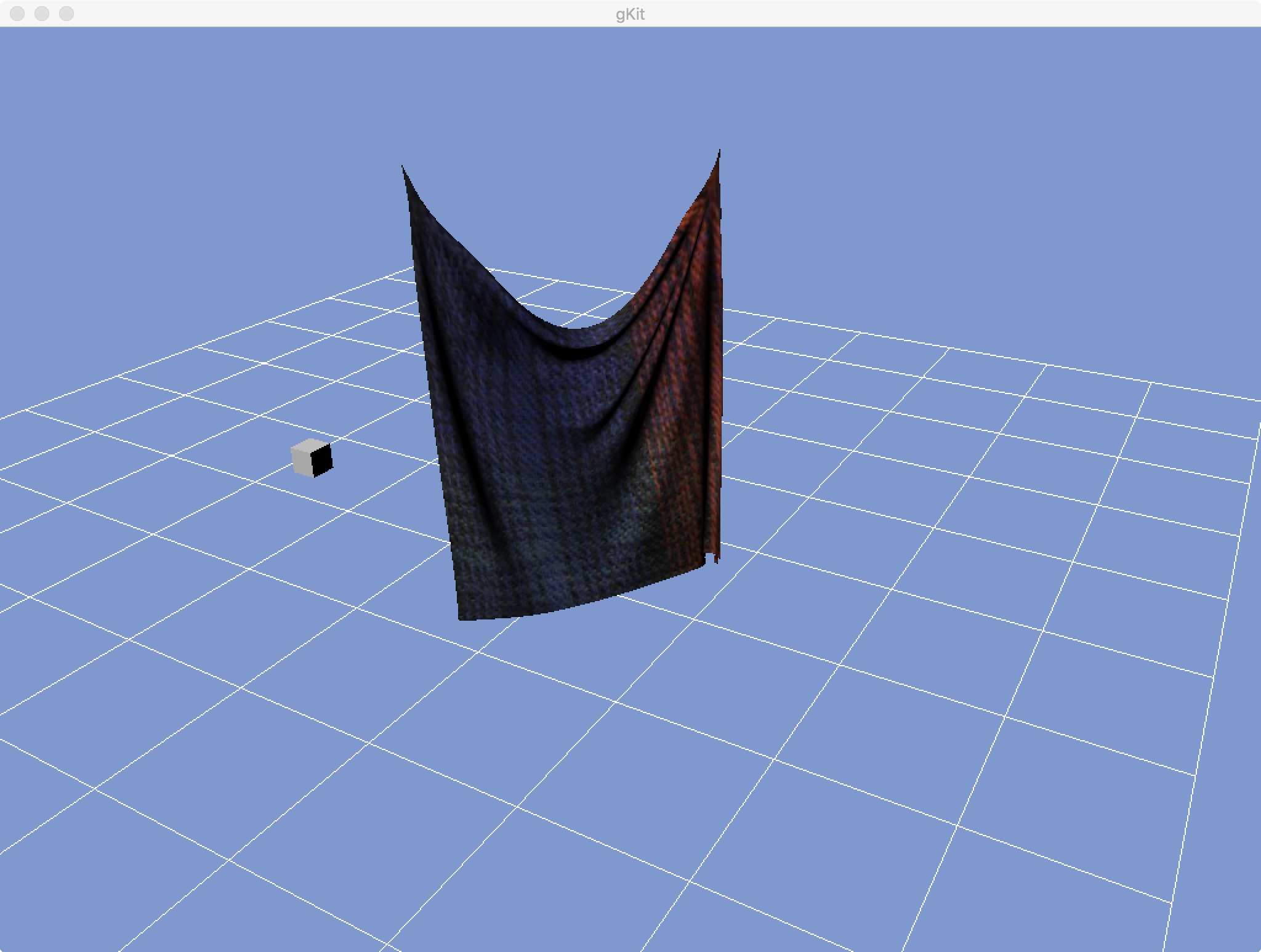
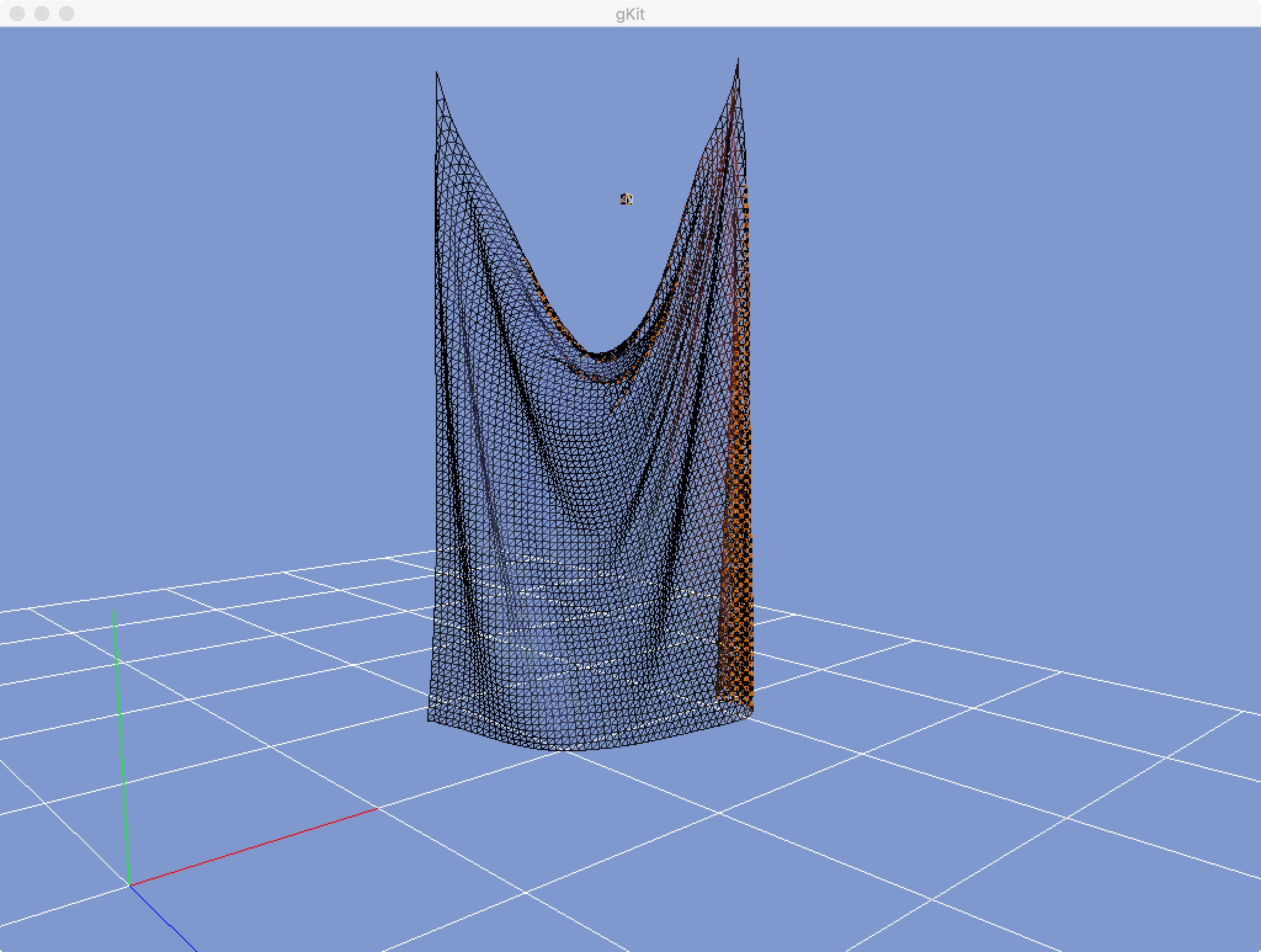
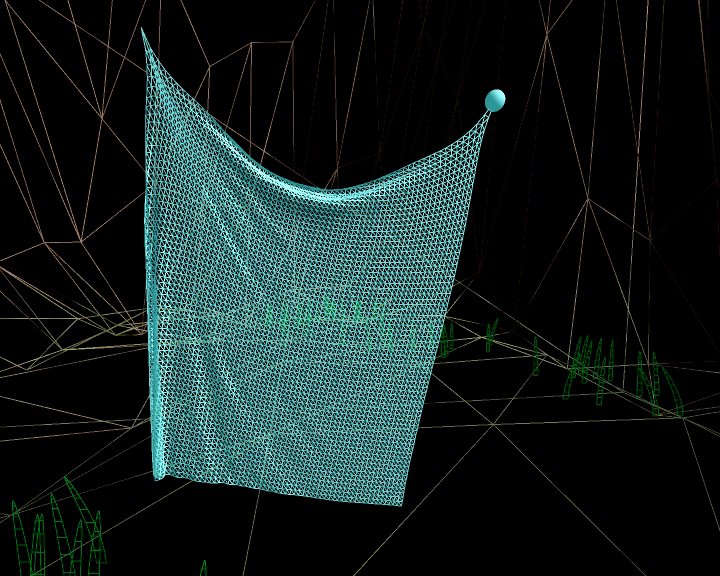
Animation, Corps Articulés Et Moteurs Physiques (ACAMP) est une UE du tronc commun du Master 2e année ID3D de l'Université Lyon 1. Les cours ont lieu à l'automne. L'objectif de l'UE est de donner les bases de l'animation en synthèse d'images. Nous aborderons les deux grandes familles de méthodes. L'animation basée sur des données, par exemple pour l'animation d'humain virtuel (données issues de capture de mouvement). Et l'animation basée sur un modèle physique pour la simulation de phénomènes naturels comme le mouvement de textiles ou de fluide. L'UE laissera une grande part à l'application pratique avec la réalisation de TPs en C++/OpenGL et avec Unity proposant d'animer par exemple des humains virtuels, des vêtements, des cordes, une surface d'eau, des objets rigides, etc.