 Low Discrepancy Sampling
Low Discrepancy Sampling 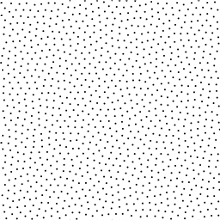 Blue Noise Sampling
Blue Noise SamplingMy research focused on Rendering, wich is Image Synthesis. I work at the LIRIS laboratory in the team R3am. During my PhD, I had the opportunity to work with several people:
-
Jean Philippe Farrugia (Master's Internship)
Jean Claude Iehl (Master's Internship)
David Coeurjolly (Best PhD supervisor ever)
Victor Ostromoukhov (PhD Director)
Jeremy Levallois
Abdallah Gafar
PhD
When you display a 3D object on a computer screen, we transform this 3D scene into a 2D image, which is a set of organized colored pixels. We call Rendering all the process that aims at finding the correct color to give those pixels. This is done by integrating all the light rays coming for every directions that the object's surface reflects back to the pixel, the whole being ponderated by a visibility function.
Unfortunately, a computer can not compute an integrand. We therefore have two possibilities to solve this issue:
-
We find an analytical expression to remove the integrand
(statistic based strategy).
Numerically approximate the equation by taking random samples in the
integration domain and approximating the integrand value using Monte Carlo methods.
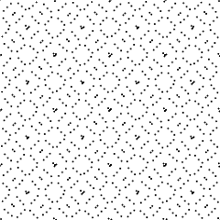
Here we focused on numerical integration and sampling theory. Sampling is a fundamental part of numerical integration. A good sampler should generate points that cover the domain uniformly to prevent bias in the integration and, when used in Computer Graphics, the point set should not present any visible structure, otherwise this structure will appear as artifacts in the resulting image. Furthermore, a stochastic sampler should minimize the variance in integration to converge to a correct approximation using as few samples as possible. There exists many different samplers that we will regroup into two families:
-
Blue Noise samplers, that have a low integration
variance while generating unstructured point sets.
The issue with those samplers is that they are often
slow to generate a pointset.
Low Discrepancy samplers, that minimize the
variance in integration and are able to generate and enrich
a point set very quickly. However, they present a lot of structural
artifacts when used in Rendering.
Our first project was the realisation of a sampler who combines the blue noise and low discrepancy properties. This sampler works by swapping independently x and y coordinates of a low discrepancy set to match the spatial organisation of a target set, here stratified Blue Noise. This work was published at SIGGRAPH Asia 2016.
[GPC*16] Gafar, A., Perrier, H., Coeurjolly, D., Ostromoukhov, V., Guo, J., Yan, D., Huang, H., Deussen, O. Low Discrepancy Blue Noise Sampling. In ACM Transactions on Graphics (Proceedings of ACM SIGGRAPH Asia 2016).
Slides of a presentation during the GT Rendu on the 16/02/2017 (in english)


 Real Time digital curvature
Real Time digital curvature 