Simulation d'une locomotion bipède par adaptation de mouvement et cinématique inverse
| Nicolas Pronost | Guillaume Nicolas | Georges Dumont | Franck Multon | Gilles Berillon |
| University of Rennes 1 | University of Rennes 2 | ENS Cachan | University of Rennes 2 | UPR 2147 |
| IRISA - SIAMES | M2S Laboratory | IRISA - SIAMES | IRISA - SIAMES | CNRS |
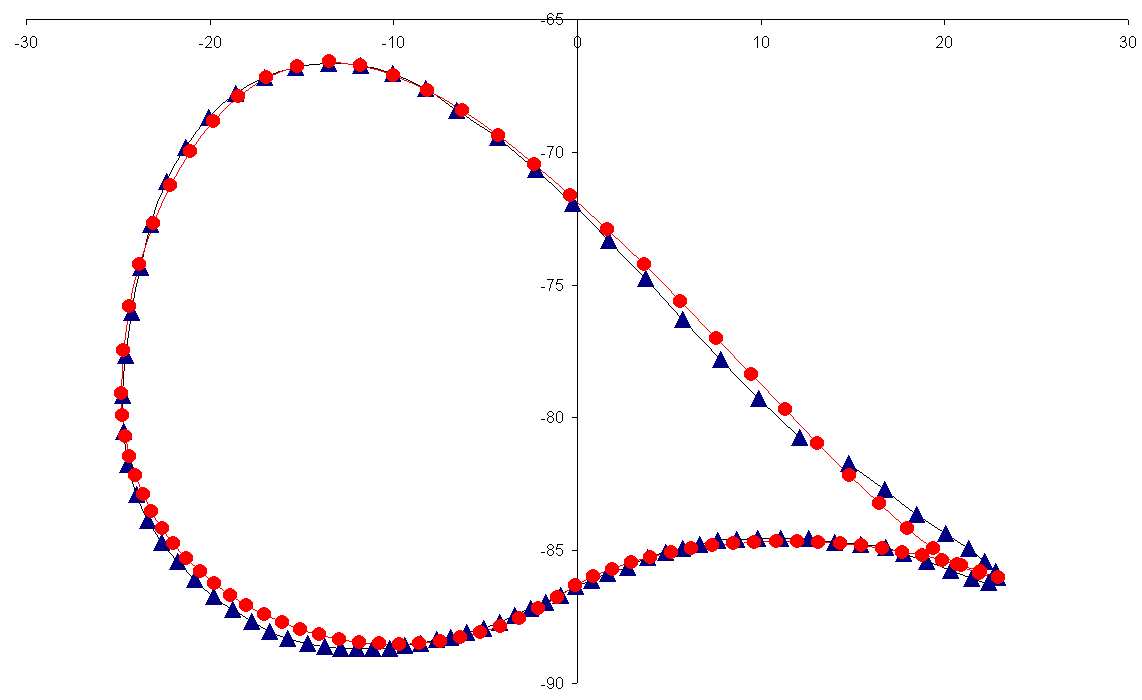
Poulaines réelle (triangle) et modélisée interpolée (rond) (axes x et z)
Abstract :
Cet article traite de l'utilisation de la cinématique inverse et de l'adaptation de mouvement pour une locomotion bipède probable à partir de données anatomiques et d'hypothèses locomotrices. Dans les approches classiques de cinématique inverse, la résolution de la tache principale impose le passage de l'effecteur par une trajectoire donnée. Pour construire cette trajectoire, considérée ici comme la trajectoire du pied dans le repère du milieu du bassin, nous utilisons une méthode d'adaptation et d'interpolation de mouvements. Les déplacements de cet effecteur sur un cycle de marche sont acquis par un système de Motion Capture puis modélisés mathématiquement. L'interpolation sur cette modélisation est faite selon trois hypothèses locomotrices: la longueur de pas, l'écartement des pas et la posture de référence de l'humanoide. Cette technique nous permet alors d'obtenir une trajectoire d'effecteur adaptée à la morphologie du squelette. Par ailleurs, la t^ache secondaire de l'équation de cinématique inverse est généralement une somme pondérée de fonctions de cout dérivables permettant de choisir une solution particulière dans l'espace des solutions. Nous avons retenu des taches secondaires qui respectent des butées articulaires ainsi que le passage par une posture de référence, et qui minimisent l'énergie cinétique de rotation. Cette méthode permet alors d'engendrer des trajectoires angulaires que nous comparons à celles issues de la littérature biomécanique. Les résultats préliminaires valident les deux approches respectives, et fournissent des données comparatives liées à la biomécanique d'un déplacement bipède (travail des forces internes, énergie mécanique, Jerk). Ce travail doit à terme permettre de tester des hypothèses sur la génération d'un mouvement de locomotion bipède, en particulier dans le domaine de la paléoanthropologie, de l'animation/simulation, ou de la rééducation fonctionnelle.
Keywords :
Humain virtuel - Simulation biomécanique - Cinématique inverse - Adaptation par interpolation - Hominidés anciens
Paper :
11èmes Journées du GTAS - Paper
BibTeX :
@inproceedings{PNDMB04,
author = {N. Pronost and G. Nicolas and G. Dumont and F. Multon and G. Berillon},
title = {Simulation d'une locomotion bipède par adaptation de mouvement et cinématique inverse},
booktitle = {11èmes Journées du GTAS},
year = {2004},
month = jun
}