Animation de personnages virtuels par modèle musculaire dynamiqueProjet de MSc recherche
Encadrants : Nicolas Pronost et Saida Bouakaz
Ce projet s’effectuera au sein de l’équipe SAARA du LIRIS.
Présentation du projet :
Ce projet se place dans le cadre de la simulation fidèle et temps-réel du mouvement d'humains réels. Pour cela une simulation s'appuie sur une représentation de cet humain réel dans le monde virtuel. Différents modèles peuvent être utilisés dépendamment de l’application visée. Dans ce projet, nous nous intéressons à des modèles impliquant l’anatomie et le fonctionnement interne du corps humain.
Le but de ce projet est de créer un nouveau modèle de ligne d’action musculaire pour la simulation temps-réel de personnages virtuels. Les modèles musculaires d’animation courant utilisent des segments de ligne (appelés ligne d’action) qui représentent qu’avec une certaine limite l’action qu’un muscle peut produire [Hill1938, Zajac1989]. Ces limites sont par exemple atteintes lorsque les attachements des muscles sont larges, lorsque les fibres ont un arrangement complexe ou bien lorsqu’elles parcourent un chemin complexe (par exemple s’enroulent autour d’os ou d’autres muscles, voir Figure 1). Certaines plateformes de simulation utilisent des surfaces primitives prédéfinies autour desquelles ces lignes d’actions s’enroulent [OpenSim2007], mais elles sont encore des approximations des déformations musculaires complexes qui existent dans le corps humain.
Hors, les simulations utilisant ces modèles sont très sensibles aux directions des forces produites par les muscles. Et le chemin d’une ligne d’action défini la direction des forces appliquées sur les os. Ainsi des chemins de lignes d’action différents ont un effet important sur les simulations [GvdPvdS2013].
Ce projet étudiera les bénéfices liés à l’utilisation de lignes d’action dynamiques i.e. qui s’adaptent à la posture, de façon plus précise que les modèles existant. Ces adaptations seront calculées par les déformations géométriques du muscle. Comme ces déformations sont coûteuses à calculer, elles seront effectuées hors-ligne, et seule une table pré-calculée de bras de levier de chaque muscle en fonction de la posture sera utilisée en temps-réel pour animer un personnage virtuel.
Ce qui est attendu à l’issu du stage se liste en trois points. (1) Il s’agira d’utiliser une méthode de déformation géométrique permettant la mise à jour de la configuration des lignes d’action. (2) Il faudra évaluer l’influence de ce nouveau modèle sur la fonction musculaire (i.e. les différences dans les forces produites sont-elles significatives ?). (3) Enfin, un scénario de démonstration devra être développé pour valider l’approche et soutenir les résultats obtenus.
Mots-clés :
Animation basée physique – modèle musculaire – contrôle de mouvement
Applications :
Ce type de simulation est assez précis et manipule des données suffisamment pertinentes pour permettre différentes applications aussi bien dans le domaine de la santé que de l’animation pour le cinéma ou les jeux vidéo. A l’aboutissement de ce projet, le modèle développé doit pouvoir, par exemple, aider à la rééducation de la marche de personnes montrant des pathologies.
Continuation du projet : Ce projet peut être poursuivit dans le cadre d’une thèse de doctorat.
Pré-requis et informations techniques :
Les développements seront principalement effectués en C++ ou C# sous environnement Windows (Visual Studio), ainsi la connaissance d’un langage de programmation orienté objet est requise. Le projet se situe dans le domaine de l’animation physique ; un intérêt pour le développement logiciel pour ce type d’environnement est ainsi souhaitable. Des connaissances en biomécanique ne sont pas requises.
Le projet se place dans la continuité de travaux préliminaires déjà réalisés dans l’équipe où un système masse-ressort a été étudié pour paramétrer les déformations des fibres musculaires qui elles-mêmes influencent les lignes d’actions.

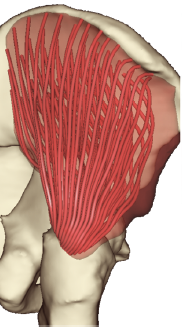
Figure 1 : Le muscle gluteus medius représenté par 3 lignes d’actions (à gauche) [OpenSim2007]
et une trentaine de fibres (à droite) [Kohout2014]
| Contact principal : | Contact secondaire : |
| Nicolas Pronost, Maitre de Conférences | Saida Bouakaz, Professeur |
| Département Informatique, bâtiment Nautibus | Département Informatique, bâtiment Nautibus |
| e-mail : nicolas[dot]pronost[at]univ-lyon1[dot]fr | e-mail : saida[dot]bouakaz[at]univ-lyon1[dot]fr |
Références :
[GvdPvdS2013] Geijtenbeek T., van de Panne M., van der Stappen A.F. : Flexible muscle-based locomotion for bipedal creatures. ACM Transactions on Graphics 32, 6 (2013), 206
[Hill1938] Hill A.V. : The heat of shortening and the dynamics constants of muscle. Royal Society of London Proceedings Series B126 (1938), 136-195
[Kohout2014] Kohout J., Kukačka M. : Real-Time Modelling of Fibrous Muscle. Computer Graphics Forum (2014)
[OpenSim2007] Delp S.L., Anderson F.C., Arnold A.S., Loan P., Habib A., John C.T., Guendelman E., Thelen D.G. : OpenSim: open-source software to create and analyze dynamic simulations of movement. Biomedical Engineering, IEEE Transactions of 54, 11 (2007), 1940-1950
[Zajac1989] Zajac F.E. : Muscle and tendon :properties, models, scaling, and application to biomechanics and motor control. Crit. Rev. Biomed. Eng. 17,4 (1989), 359-411