We present a framework for uncertainty-aware geometry processing on Gaussian Process Implicit Surfaces (GPIS), enabling computations directly on such probabilistic representations of shapes. In contrast to classical geometry processing pipelines that assume deterministic surface meshes or point clouds, our approach considers uncertainty in the input data and defines analogs of fundamental differential operators–gradient, divergence, and Laplacian– that account for the distribution of plausible geometries encoded by the GPIS. Leveraging the Kac-Rice formula, we embed computations from random surfaces into a volumetric Cartesian domain, enabling efficient evaluation of expected integrals and differential operators. The proposed approach bridges classical surface PDE-based geometry processing and volumetric representations, enabling a principled handling of noise and ambiguity for various geometry processing tasks.
ACM Transactions on Graphics (Proceedings of SIGGRAPH)
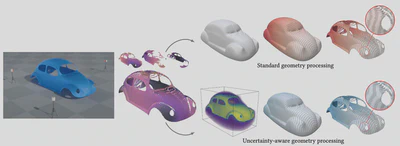
Starting from a LiDAR simulation producing samples with uncertainty values (left, RIEGL-VZ400 TLS model from helios++ \cite{heliosPlusPlus}), instead of performing downstream geometry processing tasks (e.g., geodesic computation) on a (Poisson) reconstructed surface and projecting back the results to the point cloud (top row), we first express uncertainty through a simple Gaussian Process Implicit Surface (GPIS) model, which can be efficiently evaluated pointwise. From this GPIS model, we consider its surface density $\mu$ and define uncertainty-aware differential operators (bottom row). Where the confidence is high (e.g., on the car doors), our operators (illustrated here with the geodesic distance) behave as in the standard calculus on the mean surface (which coincides with the PSR output). Where confidence is low, e.g., where data is missing, the distribution of plausible geometries is more diffuse, which results in a transition toward a volumetric representation of the shape (PDE solutions are volumetric but plotted on the mean surface and the input for the sake of clarity).
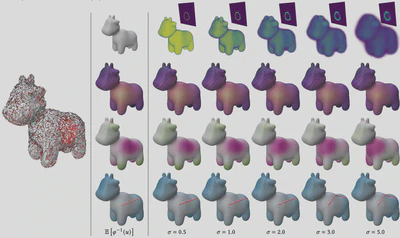
The differential operators we propose depend continuously on the level of uncertainty of the shape. As the 𝜎parameter on the input increases (left, see
App. B), the region without data, on the side of the input, is more and more uncertain (density 𝜇top row vanishing in this region). While we recover results
performed on the mean surface directly (first column) at low noise level, at high uncertainty the results evolve where data is missing: the Green’s function
(second row) decreases faster in it (log scale colormap), a nodal domain of the 9-nth eigenfunction of 𝑀−1_𝜑 𝐿_𝜑 (Sec. 10.1), drifts away from it (third row), and
the geodesic distance (Sec. 10.2) progressively considers it as a hole (fourth row). The geodesic from a fixed point is also shown. Remarkably, we observe that
the shortest path changes abruptly above a certain uncertainty level, i.e., when the geodesic front that gets around the hole is faster than the one that goes
through it.
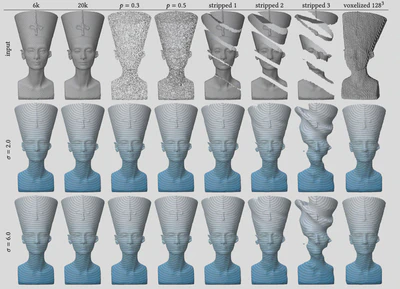
We analyze how the quality of the input data used in our GPIS model (Sec. 4, App. B) affects the rest of the framework, illustrated here through
geodesic distance computation. We vary geometric resolution (first two columns), subsampling levels (next two), and the presence of large missing regions
and voxelized output (last four), each shown for two confidence values 𝜎. Even when the mean surface is heavily degraded—and may break into multiple
connected components (e.g., stripped 3)—the resulting geodesic distance field remains stable.
{kind=link}