Stable and efficient differential estimators on oriented point clouds
Abstract
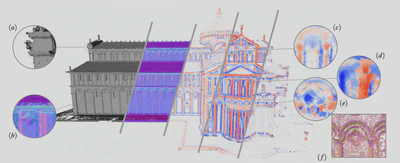
Point clouds are now ubiquitous in computer graphics and computer vision. Differential properties of the point-sampled surface, such as principal curvatures, are important to estimate in order to locally characterize the scanned shape. To approximate the surface from unstructured points equipped with normal vectors, we rely on the Algebraic Point Set Surfaces (APSS) [GG07] for which we provide convergence and stability proofs for the mean curvature estimator. Using an integral invariant viewpoint, this first contribution links the algebraic sphere regression involved in the APSS algorithm to several surface derivatives of different orders. As a second contribution, we propose an analytic method to compute the shape operator and its principal curvatures from the fitted algebraic sphere. We compare our method to the state-of-the-art with several convergence and robustness tests performed on a synthetic sampled surface. Experiments show that our curvature estimations are more accurate and stable while being faster to compute compared to previous methods. Our differential estimators are easy to implement with little memory footprint and only require a unique range neighbors query per estimation. Its highly parallelizable nature makes it appropriate for processing large acquired data, as we show in several real-world experiments.
@article{LejembleSGP2021,
author = {Thibault Lejemble, David Coeurjolly, Loïc Barthe and Nicolas Mellado},
journal = {Computer Graphics Forum (Proceedings of Symposium on Geometry Processing)},
month = {July},
number = {5},
title = {Stable and efficient differential estimators on oriented point clouds},
volume = {40},
doi = {10.1111/cgf.14368},
year = {2021}
}