A core axis class. More...
#include <axis.h>

Public Member Functions | |
| Axis () | |
| Empty. | |
| Axis (const Vector &, const Vector &) | |
| Creates an axis given end vertices. | |
| ~Axis () | |
| Empty. | |
| void | Rotate (const Matrix &) |
| Rotates an axis. | |
| void | Translate (const Vector &) |
| Translates an axis. | |
| void | Scale (const double &) |
| Uniformly scales an axis. | |
| void | Scale (const Vector &) |
| Scales an axis. | |
| Quadric | Equation (const Ray &) const |
| Compute the polynomial equation of the Euclidean distance between a ray and the axis. | |
| Vector | Vertex (int) const |
| Return one of the end vertexes of the axis. | |
| Vector | Point (const double &) const |
| Compute a point on the axis. | |
| Vector | GetAxis () const |
| Returns the normalized axis vector. | |
| double | Length () const |
| Return the axis length. | |
| Vector | Symmetric (const Vector &) const |
| Symmetric point. | |
| Sphere | Symmetric (const Sphere &) const |
| Symmetric sphere. | |
| Vector | Normal (const Vector &) const |
| Compute the normal vector between a point and its projection onto the edge. | |
| double | R (const Vector &) const |
| Compute the squared distance to the segment. | |
| double | R (const Axis &) const |
| Compute the squared distance between two axes. | |
| double | R (const Vector &, double &) const |
| Compute the squared distance to the axis. | |
| Matrix | GetFrame () const |
| Compute an orthonormal frame attached to the axis. | |
| Vector2 | Radial (const Vector &) const |
| Compute the radial coordinates of a point. | |
Static Public Member Functions | |
| static Matrix | GetFrame (const Vector &) |
| Compute an orthonormal frame attached to the axis. | |
| static Vector | BoxVector (const Vector &) |
| Compute the box vector extent of a unit circle with a given axis. | |
Static Public Attributes | |
| static const Axis | Z |
| Axes from origin, identical to Axis(Vector::Null,Vector::X) ... | |
Protected Member Functions | |
| double | Radial (const Vector &, Vector &, Vector &) const |
| Compute the radial coordinates of a point. | |
Protected Attributes | |
| Vector | b = Vector::Z |
| End vertexes of the axis. | |
| Vector | axis = Vector::Z |
| Normalized axis vector. | |
| double | length = 1.0 |
| Length of the axis. | |
Friends | |
| std::ostream & | operator<< (std::ostream &s, const Axis &axis) |
| Overloaded. | |
Detailed Description
A core axis class.
The class includes the two end vertices Axis::a and Axis::b, the normalized direction Axis::axis and the length Axis::length. It is used in several geometric classes such as Cylinder, Capsule, Cone and deformations such as Taper or Twist.
Constructor & Destructor Documentation
◆ Axis()
Creates an axis given end vertices.
- Parameters
-
a,b End vertices of the axis.
Member Function Documentation
◆ BoxVector()
Compute the box vector extent of a unit circle with a given axis.
- Parameters
-
axis Axis (should be unit).
This function is used in particular in Cylinder::GetBox(), Cone::GetBox(), Capsule::GetBox().
◆ Equation()
Compute the polynomial equation of the Euclidean distance between a ray and the axis.
- Parameters
-
ray The ray.
◆ GetFrame() [1/2]
| Matrix Axis::GetFrame | ( | ) | const |
Compute an orthonormal frame attached to the axis.
- See also
- Axis::GetFrame(const Vector&)
◆ GetFrame() [2/2]
Compute an orthonormal frame attached to the axis.
The axes of the frame are defined as the column vectors of the returned matrix.
- Parameters
-
z Vector, which should be unit.
- See also
- Axis::GetFrame()
◆ Normal()
Compute the normal vector between a point and its projection onto the edge.
- Parameters
-
p Point.
◆ R() [1/3]
| double Axis::R | ( | const Axis & | axis | ) | const |
Compute the squared distance between two axes.
- Parameters
-
axis The other axis.
◆ R() [2/3]
| double Axis::R | ( | const Vector & | p | ) | const |
Compute the squared distance to the segment.
This function is more efficient than Segment::R(const Vector&) const as Axis stores the unit vector.
- Parameters
-
p Point.
◆ R() [3/3]
| double Axis::R | ( | const Vector & | p, |
| double & | s ) const |
Compute the squared distance to the axis.
- Parameters
-
p Point. s Signed distance of the projection of argument point p onto the edge.
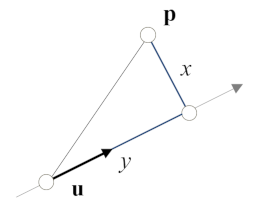
◆ Radial() [1/2]
Compute the radial coordinates of a point.
- Parameters
-
p Point.
- Returns
- A vector (x,y) where x is the radial coordinate and y the axial coordinate.
◆ Radial() [2/2]
Compute the radial coordinates of a point.
- Parameters
-
p Point. av Returned axis vector. rv Returned radial vector.
- Returns
- Axial coordinate.
◆ Rotate()
| void Axis::Rotate | ( | const Matrix & | r | ) |
Rotates an axis.
Only the vertices and the axis vector are modified, whereas the length is perserved.
- Parameters
-
r Rotation matrix.
◆ Scale() [1/2]
| void Axis::Scale | ( | const double & | s | ) |
Uniformly scales an axis.
- Parameters
-
s Scaling factor.
◆ Scale() [2/2]
◆ Symmetric() [1/2]
Symmetric sphere.
- Parameters
-
sphere The sphere.
◆ Symmetric() [2/2]
◆ Translate()
| void Axis::Translate | ( | const Vector & | t | ) |
Translates an axis.
- Parameters
-
t Translation vector.
Friends And Related Symbol Documentation
◆ operator<<
|
friend |
Overloaded.
- Parameters
-
s Stream. axis The axis.
Generated by