Dans ce chapitre, nous présentons quelques utilisations que nous avons pu faire des modèles et opérations présentés tout au long de ce mémoire. Cela nous permet d’illustrer une nouvelle fois l’intérêt de la généricité de nos travaux qui peuvent s’appliquer à différentes dimensions et dans différents domaines, bien que principalement en modélisation géométrique et traitement d’images 2D et 3D. Nous présentons également la façon dont nous avons utilisé la méthode de mise à jour locale des nombres de Betti afin de guider un algorithme de segmentation d’images 3D en intégrant un critère topologique. Ce travail est un premier résultat démontrant un apport important de l’utilisation de modèles combinatoires de haut niveau. Nous verrons que cela ouvre de nombreuses perspectives prometteuses sur la poursuite de ces travaux.
Le plan de ce chapitre est le suivant. Nous commençons Section 7.1 par présenter le modeleur géométrique à base topologique Moka qui est défini à partir d’un noyau de cartes généralisées 3D. Ce modeleur est à la base de nombreux travaux, dont un modeleur de bâtiments. Il est également l’outil d’expérimentation avec lequel il est facile de tester de nouvelles méthodes. Nous avons par exemple implanté dans Moka certaines méthodes de calcul d’invariants topologiques présentés au chapitre 6. Nous présentons ensuite Section 7.2 l’utilisation des cartes topologiques 2D et 3D (qui sont définies à partir de noyaux de cartes combinatoires pour des raisons d’espace mémoire) pour la mise en œuvre d’algorithmes de segmentation d’images. La Section 7.3 propose l’extension de ces méthodes pour la segmentation multi-échelle en utilisant les pyramides de cartes. Enfin, nous concluons et donnons des perspectives de ce chapitre à la Section 7.4.
Moka1 est un modeleur géométrique 3D à base topologique, disponible en téléchargement libre sur http://moka-modeller.sourceforge.net/. Ce projet a débuté en 1999 durant un stage de Master que j’ai encadré, puis a été poursuivi dans le cadre du projet RNTL Nogemo de Septembre 2001 à Août 2004. Le principal développeur a été Frédéric Vidil, ingénieur embauché dans le cadre de ce projet, et j’ai été le second développeur principal en collaboration avec Frédéric. Depuis la fin du projet Nogemo, je suis le chef de projet et le principal développeur de Moka.
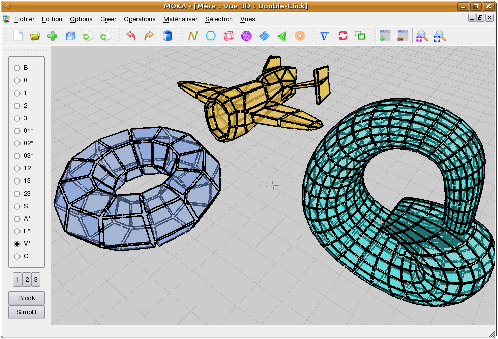
Figure 7.1: Capture d’écran de Moka avec une scène comportant différents objets : un tore obtenu par création d’objet de base, une bouteille de Klein obtenue par extrusion, couture puis lissage, et un avion obtenu par importation d’un fichier au format off.
Ce modeleur se base sur un noyau de 3G-cartes qui fournit les opérations de manipulations de base des objets 3D. Plusieurs surcouches ont été développées afin d’enrichir ce noyau de nombreuses fonctionnalités. Moka contient actuellement plus de 20 types d’opérations différentes, qui se déclinent pour la plupart en plusieurs variantes selon la dimension ou selon plusieurs options (cf. Figs. 7.2 et 7.3 pour quelques exemples d’opérations). Ces opérations principales peuvent être regroupées en grandes catégories :
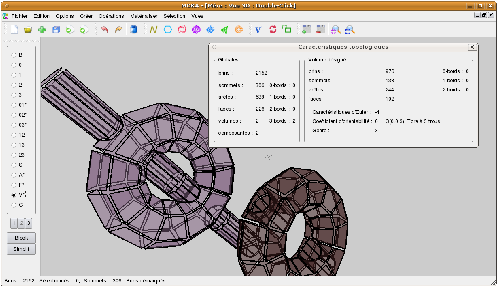
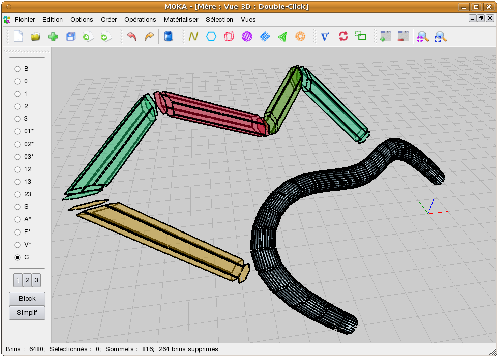
Figure 7.3: Exemple d’opération booléenne entre un tore et un cylindre. Nous avons ici conservé l’union des deux objets, et le résultat du tore moins le cylindre. La boîte de dialogue montre le calcul du nombre de cellules et de la caractéristique d’Euler-Poincaré de ce résultat qui est un tore à trois trous.
De par sa richesse en fonctionnalités et sa stabilité, Moka est un outil d’expérimentation très riche dans lequel il est facile d’intégrer et tester de nouvelles méthodes issues de problématiques de recherche. Nous avons par exemple intégré dans Moka la plupart des méthodes de calcul d’invariants topologiques présentées au chapitre 6. Nous avons pu ainsi tester nos algorithmes de simplification en forme minimale, en utilisant les invariants topologiques pour vérifier que la topologie des objets est préservée durant les simplifications.
Enfin, de par sa généricité et son nombre important de fonctionnalités, Moka a servi de base de développement à plusieurs projets de modélisation géométrique. La plupart du temps, ces projets ont des contraintes spécifiques, qu’il suffit de rajouter dans une surcouche spécifique, mais les opérations de base restent valides et utilisables. Les principaux projets ayant utilisé Moka sont VORTISS, un projet labélisé à l’ANR MDCA, dont l’objectif est la reconstruction d’organes pour l’interaction temps réel en simulation chirurgicale ; un projet de générateur d’évolutions géologiques par animation basée sur la topologie [LSM08, LSM09] ; un projet de nomination persistante afin de faire du suivi d’objets et de la réévaluation de modèles [BMSB07] ; un projet de modélisation géométrique du sous-sol [BSP+04] ; un modeleur hiérarchique de complexes architecturaux [Fra04, FML06].
Parmi ces projets, j’ai participé à l’encadrement de la thèse de Sébastien Horna [Hor08] dont l’objectif était de proposer une méthode de reconstruction topologique de complexes architecturaux 3D à partir de plans numériques 2D [HDMB07, HMDB09]. Nous avons pour cela mis en œuvre un outil de reconstruction de bâtiments 3D en utilisant les informations contenues dans les plans d’architecte, et en contrôlant la validité du résultat obtenu grâce à des contraintes métier. Nous avons proposé des opérations automatiques, mais aussi certaines opérations semi-automatiques permettant d’aider et de guider la reconstruction d’un bâtiment complet en un nombre réduit d’interactions.
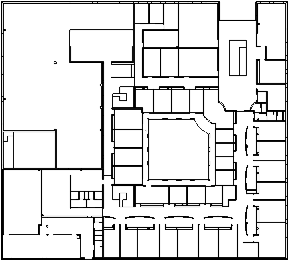
La reconstruction est réalisée en plusieurs étapes, chacune utilisant des opérations de base de Moka et des propriétés des G-cartes afin de contrôler la validité de la subdivision obtenue. Durant ce processus, les opérations géométriques sont toutes réalisées en Epsilon geometry [SSG89] (test d’intersection, de colinéarité, trouver les mêmes sommets…). Avant de débuter le processus de reconstruction, les plans d’origine doivent tout d’abord être importés dans Moka. Ces plans sont au format DXF (Drawing eXchange Format) qui est un format très répandu en CAO (cf. Fig. 7.4 pour quelques exemples). Les données récupérées sont un ensemble de segments qui représentent les plans, et nous construisons alors une G-carte dans Moka qui contient une arête pour chaque segment.
[a][b]
[c][d]
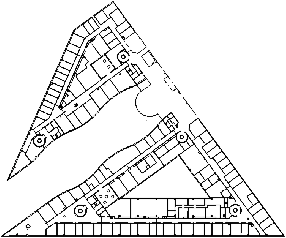
Figure 7.4: Exemple de plans 2D traités : (a) Étage 3 Sp2mi, 8120 brins ; (b) LEA, 17168 brins ; (c) LR, 25976 brins ; (d) Étage 0 Sp2mi, 33508 brins.
Nous avons à ce stade un ensemble une G-carte composée d’arêtes déconnectées. Le processus de reconstruction d’un modèle valide 2D est découpé en 5 étapes :
La première étape consiste à corriger les problèmes géométriques de l’ensemble des segments. En effet, l’objectif initial des architectes lors de la création des plans est d’avoir un résultat visuel satisfaisant. Peu importe alors que deux arêtes soient superposées, ou que deux arêtes se croisent en dehors de leurs extrémités. Mais ces cas posent problème dans notre approche car ils empèchent de garantir que nous reconstruisons bien une partition de l’espace. Afin de résoudre ces problèmes, chaque couple d’arêtes supperposées est traité et corrigé de la manière détaillée Fig. 7.5. Comme la complexité de ce processus est quadratique en le nombre total d’arêtes, nous avons utilisé une grille régulière afin d’accélérer les temps de calcul en limitant la recherche à un petit nombre d’arêtes.
[a][b]

Figure 7.5: Résolution des problèmes d’arêtes supperposées. (a) Lorsqu’une arête est incluse dans une autre, elle est supprimée. (b) Lorsqu’une arête a une partie en commun avec une autre, elle est réduite afin de supprimer cette partie. Le choix de l’arête à réduire n’importe pas dans le résultat final. En effet, le sommet de l’arête qui a été déplacé (A′ sur cet exemple) sera inséré à nouveau, lorsque c’est nécessaire, par la phase traitant les problèmes d’intersection d’arêtes.
Le traitement des problèmes d’intersection d’arêtes est réalisé en testant si l’intersection entre chaque couple d’arêtes est vide ou est une extrémité des deux arêtes. Lorsque ce n’est pas le cas, les deux arêtes s’intersectent en dehors de leurs extrémités. Le problème est alors résolu en insérant un sommet sur l’une ou sur les deux arêtes selon les configurations qui sont détaillées Fig. 7.6. Comme pour le traitement des arêtes confondues, nous utilisons également une grille régulière afin d’accélérer la recherche sur les couples d’arêtes ayant une intersection non vide.
[a][b]
[c]
[d]
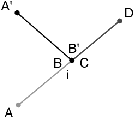
Figure 7.6: Résolution des problèmes d’intersection d’arêtes. (a) Lorsque deux arêtes s’intersectent en leurs milieux, (b) il faut insérer un sommet au point d’intersection sur les deux arêtes. (c) Lorsque deux arêtes s’intersectent en l’extrémité de l’une mais pas de l’autre, (d) il faut insérer un sommet seulement sur une arête.
Nous avons maintenant un ensemble d’arêtes disjointes sans problème géométrique. Nous passons alors à la seconde phase qui consiste à relier ces arêtes entres elles afin de former des faces. Nous utilisons pour cela un algorithme d’interclassement qui consiste à trier angulairement les arêtes incidentes à un même sommet, puis à les relier deux à deux par α1 en cousant à chaque étape l’arête courante avec la prochaine arête dans l’ordre angulaire. Après avoir traité toutes les arêtes du sommet, il reste à fermer la boucle en cousant la dernière arête avec la première. Ce processus est illustré Fig. 7.7. Après avoir traité toutes les arêtes de la G-carte, nous avons défini les liaisons α1 de chaque brin, ce qui fait que la G-carte est désormais 1-fermée. Comme elle était 0- et 2-fermée par construction (chaque arête est créée avec quatre brins et ses liaisons α0 et α2), la 2G-carte est donc fermée. Durant ce processus, nous devons trouver toutes les arêtes qui partagent une même extrémité, et à nouveau l’utilisation d’une grille régulière permet d’accélérer cette recherche en la limitant aux brins appartenant à la même cellule de la grille. Il faut noter que ce travail pourrait sans doute être amélioré en utilisant un algorithme de calcul d’arrangements de segments [EGS90], ainsi qu’en utilisant des calculs géométriques exacts [Yap04].
[a][b]
[c]
[d]
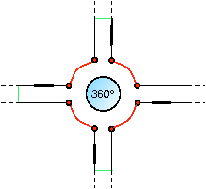
Figure 7.7: Illustration du processus d’interclassement. (a) Configuration initiale dans laquelle nous avons un ensemble d’arêtes partageant une même extrémité. (b) Première liaison par α1. (c) Résultat après avoir traité toutes les arêtes. (d) Résultat final après avoir fermé la boucle en cousant la dernière arête avec la première.
L’étape suivante consiste à corriger le problème survenant lorsque la G-carte est composée de plusieurs composantes connexes. En effet, comme expliqué au chapitre 4 dans le cadre des cartes topologiques, ces différentes composantes sont déconnectées et sans lien entre elles. De ce fait, les faces de la subdvision ne sont pas correctement représentées dans la carte. La solution utilisée ici est à nouveau l’ajout d’arêtes fictives rendant la carte connexe, et liant entre elles les différentes composantes connexes (cf. Fig. 7.8). Pour chaque composante connexe C, une recherche est effectuée afin de trouver la face contenant géométriquement C. Une arête fictive est alors insérée entre la face externe de la composante connexe et sa face englobante. Les sommets support de cette arête sont choisi de telle manière d’éviter que l’arête insérée intersecte une autre arête (cf. [Hor08] pour plus de détails).
[a][b]
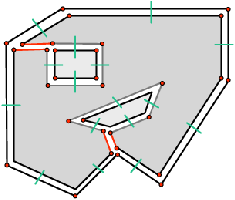
Figure 7.8: Ajout d’arêtes fictives pour rendre la carte connexe. (a) Configuration initiale composée de trois composantes connexes. (b) Carte finale après avoir inséré deux arêtes fictives.
Le dernier problème pouvant se poser est la présence d’arêtes pendantes. Ce problème est lié à l’application car ce type d’arête correspond ici à une incohérence qui est due à une imprécision numérique ou à l’omission d’un objet par l’architecte (cf. quelques exemples Fig. 7.9).
[a][b]
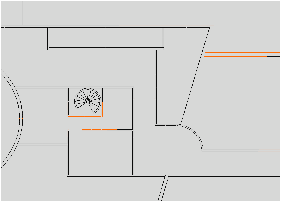
Figure 7.9: Exemple d’arêtes pendantes (en rouge) détectées dans un plan 2D. (a) Des erreurs numériques font que les arêtes associées aux marches de l’escalier ne touchent pas le rectangle englobant. (b) Un exemple d’objet manquant, ici probablement une porte.
La correction de ce problème dépend du contexte de l’arête pendante et ne peut pas être réalisée de manière totalement automatique. En effet, selon les cas, cette correction va consister à :
Ces quatre opérations sont proposées à l’utilisateur, avec des variantes permettant par exemple d’appliquer simultanément un ensemble d’opérations, ou d’essayer automatiquement de prolonger chaque arête pendante en dessous d’un seuil donné afin de corriger automatiquement les arêtes très proches qui sont souvent issues d’erreurs de précision numérique.
Nous avons désormais une partition 2D valide. La dernière étape consiste à associer une sémantique à chaque face qui sera utilisée ensuite lors de l’extrusion du plan afin de construire le modèle 3D. Nous avons défini des étiquettes sémantiques (mur, façade, sol, plafond, porte, fenêtre, escalier, pièce), chaque face de la carte étant associée avec exactement une étiquette. Nous avons ensuite défini des contraintes de voisinage (par exemple une porte doit être adjacente à deux murs et deux pièces) et nous utilisons ces contraintes afin de déterminer automatiquement le plus d’étiquettes sémantiques possible. Nous commençons par affecter la façade car nous savons que c’est la face externe de la 2G-carte, qui se retrouve simplement en utilisant les coordonnées des sommets.
Ensuite, nous avons défini un algorithme de propagation des sémantiques qui utilise les contraintes de voisinages pour propager les valeurs sémantiques de proche en proche. Enfin, nous avons proposé des heuristiques permettant de déterminer automatiquement les étiquettes sémantiques non affectées en utilisant des caractéristiques géométriques des faces (par exemple des coefficients d’élongation, le co-degré des faces…). Nous avons offert la possibilité à l’utilisateur de vérifier et corriger la sémantique associée à chaque élément du modèle, tout en contrôlant à chaque fois que les contraintes de voisinages soient respectées.
[a][b]
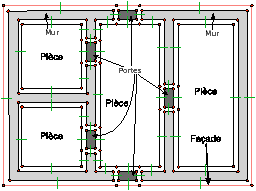
Figure 7.10: Résultat obtenu à la fin des 5 étapes de reconstruction du modèle 2D. (a) Le plan initial. (b) La 2G-carte reconstruite avec sa sémantique associée.
À la fin des cinq étapes de reconstruction 2D, nous obtenons une 2G-carte valide correspondant au plan initial, avec une sémantique associée à chacune de ses faces (cf. Fig. 7.10). Nous avons désormais toutes les informations nécessaires afin de transformer ce modèle en bâtiment 3D. Cette reconstruction 3D se décompose à son tour en trois étapes :
La première étape est l’extrusion du modèle 2D qui permet de le convertir en modèle 3D. Comme nous pouvons voir Fig. 7.11, il existe trois types d’extrusion selon la sémantique de la face. L’opération d’extrusion existe déjà dans Moka, la seule difficulté est ici de l’appeler avec les bons paramètres, puis ensuite de relier les différents volumes issus des trois types d’extrusion. Après cette étape, nous obtenons un modèle 3D où chaque face du plan 2D est devenue un volume 3D. Durant cette étape d’extrusion, nous propageons correctement la sémantique des faces aux volumes créés.
[a][b]
[c]
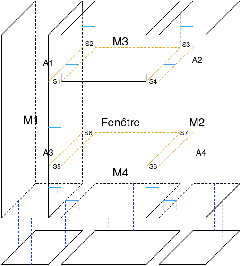
Figure 7.11: Les trois types d’extrusion possibles en fonction de la sémantique des faces. (a) Cas général (pièce, mur, façade) : extrusion le long d’un chemin composé d’une seule arête. (b) Cas d’une porte : extrusion le long d’un chemin composé de deux arêtes. La première arête pour la porte elle-même, la seconde pour le pan de mur au dessus de la porte. (c) Cas d’une fenêtre : extrusion le long d’un chemin composé de trois arêtes. La première arête pour le mur en dessous de la fenêtre, la seconde pour la fenêtre elle-même, et la troisième pour le mur au dessus de la fenêtre.
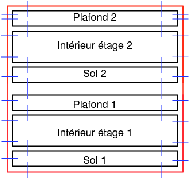
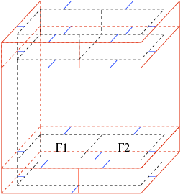
La seconde étape consiste à créer un volume sol et un volume plafond en dessous (resp. en dessus) du résultat de l’extrusion. Ces volumes sont construits à partir d’une copie des faces inférieures (resp. supérieures) de l’étage, comme illustré Fig. 7.1. Ces volumes ont deux raisons d’être : la première raison est physique, car ils correspondent à la réalité d’un bâtiment et peuvent avoir un impact, par exemple sur des simulations de propagation d’ondes. La seconde raison est qu’ils servent lors de la superposition de plusieurs étages. En effet, comme illustré Fig. 7.12, lorsque les deux étages ont la même géométrie, cette superposition revient à supprimer la face supérieure du plafond du premier étage, et la face inférieure du sol de l’étage à superposer, puis à relier entre elles les faces qui étaient incidentes à ces faces supprimées.
Figure 7.12: Sol, plafond et superposition d’étages. (a) Illustration des volumes sol et plafond. (b) Configuration initiale avant la superposition. (b) La face supérieure du plafond et la face inférieure du sol sont supprimées. (c) Les faces adjacentes sont reliées entre elles.
Lorsque les étages ont des géométries différentes, une étape supplémentaire est nécessaire afin de découper la géométrie de la face entre les deux étages, de manière à créer une sous-partie identique. Cette découpe s’effectue au moyen des opérations d’insertion de sommet et d’arête. C’est ensuite le long de cette partie commune que les étages sont superposés en se ramenant au cas précédent où les deux étages avaient la même géométrie (cf. Fig. 7.13 pour deux exemples d’étages superposés).
[a][b]
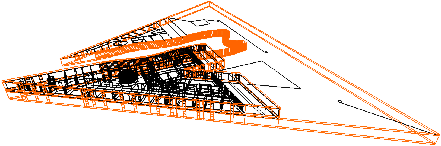
Figure 7.13: Deux exemples de résultats obtenus après extrusion et superposition de deux étages. (a) Cas de deux étages ayant la même géométrie. (b) Cas de deux étages ayant des géométries différentes.
La dernière étape du processus de reconstruction 3D consiste à relier les étages entre eux en insérant des escaliers. Ces escaliers sont présents dans les plans 2D, et détectés automatiquement durant la phase d’assignation de sémantique par la présence de nombreuses petites faces similaires, en tenant compte des différents types d’escaliers possibles (droits, colimaçons…). Les faces étiquetées escalier ne sont pas extrudées durant l’étape précédente, et les escaliers sont construits par un algorithme spécifique. Afin de relier les étages entre eux, l’étage supérieur est découpé par un volume obtenu par extrusion de la forme de l’escalier dans le plan 2D, en utilisant les opérations booléennes de Moka (et plus précisément la soustraction, cf. Fig. 7.14 pour deux illustrations).
[a][b]

Figure 7.14: Visualisation du résultat d’insertion d’un escalier en colimaçon entre deux étages.
Nous avons également proposé d’autres opérations (non détaillées ici) permettant de finaliser le modèle 3D, comme la construction de toit qui est basée sur l’opération de chanfreinage, ou d’autres opérations de modification permettant à l’utilisateur de modifier soit le plan 2D reconstruit, soit directement le modèle 3D à la fin de l’ensemble de la reconstruction. Nous pouvons par exemple citer les fusions et découpes de pièces qui s’appuient sur les opérations de suppression et d’insertion, les translations de murs avec contraintes, la simplification et à l’inverse la triangulation des scènes, ou encore l’ameublement automatique (cf. Fig. 7.15), ou une visualisation interactive. Pour toutes ces opérations, nous utilisons à chaque fois différentes cellules de la subdivision, ainsi que les relations d’adjacence et d’incidence entre ces cellules, ce qui montre l’intérêt d’utiliser un modèle combinatoire décrivant toutes ces informations.

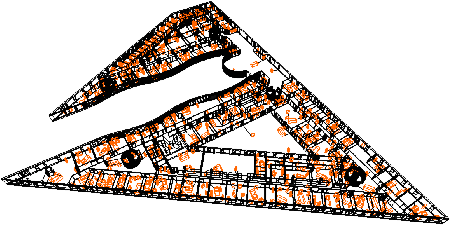
Figure 7.15: Exemple de résultat obtenu après l’opération d’ameublement automatique. (a) Pour le bâtiment LEA. (b) Pour le bâtiment Étage 0 Sp2mi.
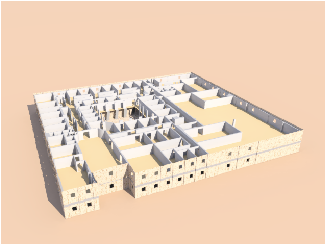
Grâce à toutes ces opérations, nous disposons d’une chaîne complète de traitement partant de la reconstruction de bâtiments à partir de données numériques 2D jusqu’à la visualisation de ces environnements en utilisant une méthode de lancer de rayons interactive. Le point fort de notre approche est que chaque étape composant la chaîne de reconstruction utilise des contraintes géométriques, topologiques et sémantiques de notre modèle, ce qui garantit l’obtention d’un modèle valide. Nous pouvons voir Fig. 7.16 quelques résultats de reconstruction obtenus.

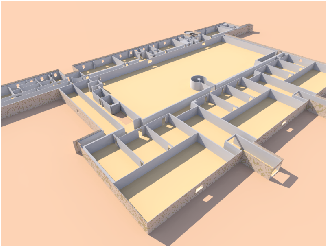
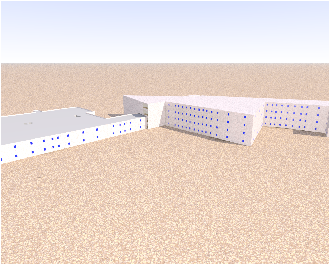
Figure 7.16: Bâtiments 3D reconstruits à partir de plans numériques, et visualisés avec le logiciel Pov-ray.
Notre deuxième champ d’expérimentation privilégié est le traitement d’images, en suivant et étendant l’idée initiale qui était d’utiliser un graphe d’adjacence de régions pour la résolution de problématiques de traitement d’images. Nous avons utilisé le modèle des cartes topologiques et les opérations proposées au chapitre 4 afin de mettre en œuvre des algorithmes de segmentation d’images. Nous avons tout d’abord adapté l’algorithme proposé dans [FH98, FH04], qui est basé sur une segmentation par croissance de régions en utilisant un critère basé sur la notion de contraste d’une région définie sur un graphe.
De manière simplifiée, la méthode originale consiste à associer un sommet du graphe à chaque pixel de l’image, à mettre une arête entre chaque couple de pixels 4-voisins (la méthode initiale était proposée en 2D), et à associer un poids à chaque arête, qui est une mesure non négative de dissimilarité entre les éléments associés aux deux sommets extrémités de l’arête. Avec ce formalisme, une segmentation de l’image est induite par un sous-ensemble d’arêtes : chaque composante connexe dans le sous-graphe induit par cet ensemble d’arêtes correspond à une région de la segmentation. Dans la méthode originale, les auteurs utilisent deux prédicats pour mesurer la dissimilarité des régions : le contraste interne à une région Int(R) qui est le poids de l’arête de coût maximum dans l’arbre couvrant de poids minimum des arêtes de cette région ; et le contraste externe entre deux régions Ext(R1,R2) qui est le poids de l’arête de coût minimum entre R1 et R2.
Deux régions R1 et R2 sont considérées comme similaires si Ext(R1,R2)>MInt(R1,R2), avec MInt(R1,R2)=min(Int(R1)+τ(R1), Int(R2)+τ(R2)) qui est le plus petit contraste interne des régions R1 et R2 pondéré par une fonction τ qui permet de paramétrer l’algorithme.
Le rôle de τ est de mitiger l’estimation du contraste interne lorsque celui-ci n’est pas représentatif comme par exemple pour les petites régions. Les auteurs suggèrent d’utiliser une fonction τ(R) = k / |R| avec |R| le nombre de pixels de R, et k une constante qui définit l’échelle de segmentation : en augmentant k, le nombre de régions fusionnées va augmenter. N’importe quelle fonction à valeurs positives peut être utilisée pour τ.
Dans leur article, les auteurs établissent une notion de segmentation optimale (pour le critère donné) qui est une segmentation n’ayant pas deux régions voisines pouvant fusionner (segmentation appelée sur-segmentation), ni une région pour laquelle il existe un raffinement qui n’est pas une sur-segmentation (segmentation appelée sous-segmentation) et montrent que leur algorithme produit une segmentation optimale.
Nous avons adapté cet algorithme aux cartes topologiques 2D et 3D, en modifiant les critères de contraste pour les rendre plus facilement calculables [DD08b]. Pour cela, nous avons transformé le contraste externe Ext(R1,R2) en un contraste associé à chaque face de la carte Ext(f). Nous avons prouvé que le contraste externe entre R1 et R2 est égal au plus petit des contrastes de toutes les faces entre ces deux régions. Avec cette modification, nous pouvons associer chaque contraste externe aux faces de la carte topologique, et chaque contraste interne aux régions. De ce fait, étant donné un brin, nous retrouvons en O(1) ces deux valeurs.
L’Algorithme 7.2 présente la segmentation d’une image par critère de contraste à l’aide d’une carte topologique. Il prend en paramètre une carte topologique M représentant une sur-segmentation d’une image et modifie la carte afin que la partition représentée soit optimale. Cet algorithme est donné ici en 3D mais est directement modifiable en dimension n, en remplaçant β3(b) par βn(b), et en associant le contraste externe aux (n−1)-cellules. Nous avons également prouvé dans [DD08b] que cet algorithme est équivalent à l’algorithme original.
Figure 7.17: Algorithme : Segmentation par critère de contraste
- Entrées : Une carte topologique 3D M.
- Résultat : M représente la segmentation optimale de l’image.
L ← liste triée des faces;
Tant que L n’est pas vide faire
b ← défiler L;
f ← face(b);
R1 ← region(b); R2 ← region(β3(b));
Si R1 ≠ R2 alors
Si Ext(f) ≤ MInt(R1,R2) alors
R ← fusionner symboliquement R1 et R2;
Int(R) ← Ext(f);
fusion effective des régions dans la carte topologique;
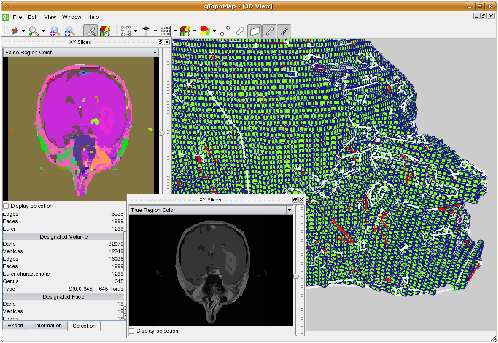
Cet algorithme utilise l’opération de fusion globale évoquée Section 4.5.2, la seule différence porte sur l’initialisation des arbres union-find qui est réalisée au moyen des critères de contraste. Cet algorithme montre à nouveau l’intérêt des cartes topologiques qui autorisent la manipulation de différentes cellules (ici les régions et les faces entre les régions) en décrivant les relations d’adjacence et d’incidence entre ces cellules. Nous avons intégré cette méthode à nos deux logiciels permettant de calculer les cartes topologiques 2D et 3D à partir d’images (cf. Fig. 7.18 pour une capture d’écran du logiciel 3D) et effectué plusieurs expérimentations afin d’étudier l’efficacité de notre approche. Ces résultats montrent en moyenne que la segmentation d’une image 3D de taille 256×256×93 est réalisée en 13 secondes ce qui est tout à fait raisonnable sachant que le logiciel développé est pour le moment un prototype et pourrait bénéficier de nombreuses optimisations.
De plus, nous avons proposé des variantes de cet algorithme, en modifiant simplement le critère utilisé pour autoriser la fusion, afin par exemple de proposer un algorithme fusionnant chaque région de taille inférieure à un seuil donné avec la région la plus proche dans son voisinage. Cette opération permet de supprimer rapidement toutes les petites régions obtenues après une passe de segmentation, qui sont souvent issues de bruit.
Nous avons proposé dans [DD09] une variante particulièrement intéressante, et justifiant l’intérêt d’un modèle topologique, qui consiste à intégrer un critère topologique à l’algorithme de segmentation. Nous avons pour cela utilisé la méthode de calcul des nombres de Betti des régions de la carte topologique présenté Section 6.3, et avons montré comment utiliser ces nombres de Betti au sein du critère de segmentation. Notre idée est de contrôler l’évolution des nombres de Betti durant la segmentation afin de guider le résultat en fonction de connaissance a-priori. Un exemple d’utilisation pourrait être la segmentation du cortex cérébral sur les images IRM, où un résultat connu en médecine dit que chaque hémisphère du cortex est homéomorphe à une sphère sans cavité. En intégrant un critère topologique basé sur les nombres de Betti, nous pouvons garantir que le résultat produit par la segmentation vérifie cette propriété.
Pour mettre en place ce contrôle, nous conservons le même algorithme de segmentation que nous venons de présenter, en modifiant simplement le critère utilisé lors de la fusion symbolique. Durant l’exécution de cet algorithme, pour chaque face courante incidente à R1 et R2, nous effectuons les quatre étapes suivantes :
Le premier test utilise un critère valeur classique, par exemple celui à base des contrastes, afin de fusionner des zones homogènes de l’image. Lorsque ce critère est satisfait, nous calculons les nombres de Betti de la région que nous obtiendrions comme résultat de la fusion en utilisant la méthode de mise à jour locale, et vérifions si le critère topologique sur cette éventuelle future région est satisfait. Lorsque c’est le cas, la fusion symbolique est réalisée.
Nous avons proposé différents types de critères topologiques, qui peuvent contrôler l’évolution des tunnels avec b1 et/ou des cavités avec b2. Ces critères peuvent être :
Il est simple de définir d’autres critères, voire de combiner les deux nombres de Betti afin par exemple d’autoriser les objets pour lesquels la somme des nombres de tunnels et de cavités est inférieure à un seuil donné.
Afin de réaliser ce critère topologique, nous calculons les nombres de Betti de R1 ∪ R2 au cours de l’étape de la fusion symbolique, sans réaliser effectivement cette fusion, ce qui est beaucoup plus efficace. Par contre, cela demande à modifier le parcours de surface utilisé lors de la mise à jour locale des nombres de Betti afin de parcourir les régions résultantes de la fusion symbolique. Il suffit pour cela de traverser également les brins des faces internes des régions, c’est-à-dire les faces incidentes à un brin b tel que find(region(b))=find(region(β3(b))). Traverser ces faces revient à parcourir le chemin de connexion entre les brins situés autour de celles-ci, ce qui nous ramène bien au parcours des brins de la surface obtenue après la suppression des faces internes.
Nous avons effectué plusieurs tests afin d’étudier l’impact du critère topologique sur le résultat de segmentation. Nous pouvons voir Fig. 7.19 un exemple obtenu avec une image artificielle en utilisant un critère topologique interdisant à b1 de dépasser un certain seuil. Nous voyons sur cet exemple l’impact du critère topologique qui entraîne différents résultats. Comme ici le critère utilisé interdit strictement à b1 de dépasser le seuil, nous garantissons que chaque région du résultat a bien un b1 inférieur ou égal au seuil. Ce résultat dépend toutefois de la partition initiale. En effet, il est garanti uniquement si chaque région de la carte initiale est homéomorphe à une boule sans cavité. Si ce n’est pas le cas, nous ne pourrons pas, avec cette méthode, garantir de propriétés sur chaque région.
[a][b]
[c]
[d]
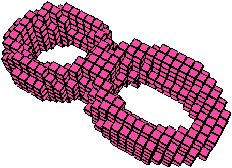
Figure 7.19: Expériences avec une image 3D artificielle, en utilisant un critère topologique interdisant à b1 de dépasser un certain seuil k (la région de fond n’est pas représentée afin d’observer ce qui se passe sur la région claire). Figure 7.2 Image originale. Chaque voxel de l’image appartient à une région différente. Figure 7.2 Résultat avec k=0. L’objet est représenté par trois régions, chacune n’ayant pas de tunnel. Figure 7.2 Résultat avec k=1. L’objet est représenté par deux régions, une ayant un tunnel, l’autre non. Selon l’ordre des fusions (qui dépend de la couleur des voxels) nous aurions pu obtenir deux régions sans tunnel, ou deux régions à un tunnel. Figure 7.2 2-tore obtenu lorsque nous n’utilisons pas de contrainte sur les nombres de Betti.
Nous avons utilisé les pyramides généralisées afin de mettre en place un outil de segmentation multi-échelle d’images 3D [SD06]. La construction d’une telle pyramide se base sur le même principe que celui utilisé lors de la définition des cartes topologiques 3D pour simplifier une carte en sa forme minimale, ainsi que sur l’algorithme de segmentation d’une carte présenté section précédente. L’intérêt de conserver plusieurs niveaux de segmentation d’une même image est de pouvoir ensuite travailler en parallèle sur plusieurs niveaux de segmentation différents, de choisir la segmentation la plus adaptée à l’opération effectuée, ou d’effectuer un traitement préliminaire sur une segmentation relativement grossière qui va donc demander moins de ressources, puis de concentrer les traitements de manière locale sur une segmentation plus fine.
La pyramide de cartes généralisées utilisée dans le cadre de la segmentation multi-échelle d’une image 3D représente chaque niveau de segmentation et permet une navigation entre les niveaux de segmentation mais aussi entre les cellules les composant. La construction de cette pyramide est réalisée à partir d’une première carte qui représente soit chaque voxel de l’image dans sa propre région, soit qui est une pré-segmentation de l’image initiale en un grand nombre de régions. Le choix de la méthode initiale dépendra de la taille des images à traiter et du niveau de bruit.
Ensuite, l’ajout d’un nouveau niveau de segmentation est obtenu en trois étapes :
En n’effectuant qu’un seul type de suppression à la fois, l’ajout d’un k-ième niveau de segmentation d’une image est réalisé par l’ajout de trois nouveaux niveaux dans la pyramide :
La pyramide permettant de représenter différents niveaux de segmentation d’une même image 3D peut être définie formellement de la manière suivante.
Le critère de segmentation utilisé pour construire chaque nouveau niveau de segmentation peut-être celui présenté à la section précédente basé sur les contrastes ou un autre, et il peut éventuellement intégrer un critère de contrôle topologique. En effet, tout les travaux présentés dans les chapitres précédents (calcul des cartes topologiques et des invariants topologiques) s’étendent directement aux pyramides puisque chaque niveau est une carte généralisée. De plus, ces travaux peuvent souvent être optimisés en utilisant le modèle hiérarchique afin de propager les calculs et simplifier les opérations et les parcours. Nos expérimentations de segmentation hiérarchique 3D se sont pour le moment limitées à des images artificielles de très faibles tailles, afin de tester et valider les algorithmes. Ces travaux autour de l’utilisation de ces pyramides doivent être poursuivis et étendus afin de pouvoir traiter des images réelles de taille plus importante, et de définir des méthodes de traitement d’images hiérarchiques.
Dans ce chapitre, nous avons présenté différentes utilisations des cartes et des extensions présentées tout au long de ce mémoire. Nos champs privilégiés d’expérimentation sont la modélisation géométrique et le traitement d’images. Ces deux thématiques de recherche, a priori relativement éloignées, se rejoignent dans les besoins de décrire des objets, les cellules des subdivisions, et les relations d’incidence et d’adjacence entre les cellules. De plus, les opérations spécifiques développées dans des applications précises se rejoignent souvent dans l’utilisation d’opérations de base communes (par exemple les opérations de suppression), et dans les besoins de contrôler l’évolution des objets durant ces simplifications. Nous avons par exemple pu voir que le problème de déconnexion se produisant dans le cadre de la reconstruction de complexes architecturaux est résolu par l’adjonction d’arêtes fictives qui est la solution utilisée pour résoudre le même problème dans les cartes topologiques 3D.
Nous avons également vu dans ce chapitre comment mettre en œuvre un processus de segmentation d’images à l’aide des cartes topologiques. Dans un premier temps, nous avons simplement porté un algorithme existant sur les graphes. Mais nos travaux trouvent leur pleine justification dans l’utilisation d’un critère topologique au sein de l’algorithme de segmentation. En effet, mettre en place ce critère nécessite d’être capable de calculer efficacement, donc localement, l’évolution des caractéristiques topologiques étudiées, ce qui est possible ici grâce à l’utilisation d’un modèle à base de carte décrivant la topologie de la subdivision.
Nous avons également utilisé les cartes combinatoires dans différentes autres applications. Nous pouvons citer un algorithme de remplissage de l’intérieur de régions [DA07], une méthode de reconstruction parallèle de contours discrets multi-régions [DC08], ou encore des méthodes de segmentation d’images 2D par approches stochastiques à base de chaînes de Markov [BAD+02, DAB03]. Dans chacun de ces cas, les cartes permettent de manipuler la subdivision des objets manipulés, d’associer des informations aux cellules (comme par exemple des équations de droites discrètes aux arêtes pour la reconstruction parallèle de contours discrets), et d’utiliser des critères topologiques (comme par exemple la profondeur dans l’arbre d’imbrication pour le remplissage de l’intérieur de régions).
Les poursuites possibles de ces travaux sont nombreuses et les perspectives très riches. Tout d’abord dans le cadre de la modélisation, nous souhaitons étudier le lien entre les pyramides de cartes et les opérations de modélisation, afin de pouvoir, à long terme, proposer un modeleur géométrique qui devrait être l’équivalent de Moka, mais totalement hiérarchique. Pour cela, nous devons étudier chaque opération et définir quel est le résultat à produire dans le cas hiérarchique. L’intérêt de ce type d’opération réside à nouveau dans les optimisations possibles en effectuant certains calculs à une faible résolution puis en propageant ces informations de proche en proche dans les niveaux de la pyramide.
Ces perspectives sont plus importantes concernant le traitement d’images. En effet, nous avons pour le moment proposé un premier critère topologique de contrôle de segmentation, et ce travail doit être poursuivi et développé afin de montrer pleinement son intérêt dans des problématiques réelles. Pour cela, nous devons travailler en collaboration avec des spécialistes de traitement d’images, et nous atteler à la résolution de problèmes concrets dans lesquels nous sommes convaincus que l’apport d’information topologique peut aider à améliorer le résultat obtenu. De plus, nous pouvons également envisager de proposer de nouvelles opérations utiles dans le cadre du traitement d’images. Nous souhaitons développer de nouveaux critères de segmentation, utilisant par exemple des critères géométriques sur la taille ou la forme des frontières entre les régions, mais aussi des nouvelles opérations semi-interactives afin de permettre à un expert de corriger simplement le résultat d’une segmentation qu’il ne trouverait pas satisfaisant. Ce type d’opération rejoint partiellement les opérations de modélisation géométrique, tout en rajoutant un contrôle supplémentaire lié au fait que l’espace sous-jacent est discret. Nous envisageons par exemple une opération de découpe d’une région 3D, qui serait guidée par la souris de l’expert mais également par les données images, par exemple en utilisant une image de gradient, tout en ajoutant un contrôle topologique. Ces travaux peuvent être très nombreux et trouver des débouchés importants, mais nécessitent des collaborations avec des spécialistes afin de répondre à des problématiques précises.
Une dernière perspective de recherche qui est relativement récente concerne l’intégration d’un noyau de cartes combinatoires dans la CGAL (Computational Geometry Algorithms Library, cf. http://www.cgal.org/), une bibliothèque très importante de géométrie algorithmique. Cette bibliothèque très riche permet pour le moment, entre autres, de manipuler des triangulations 2D et 3D, et des subdivisions cellulaires 2D à l’aide d’une structure de demi-arêtes, mais il n’existe pas de structure pour les subdivisions cellulaires 3D ce qui peut s’avérer limitant pour ses utilisateurs. Nous avons donc commencé à développer un noyau de cartes combinatoires pouvant s’intégrer dans CGAL, en utilisant l’expérience acquise durant le développement de Moka et des deux programmes autour des cartes topologiques 2D et 3D. Notre premier objectif est de proposer assez rapidement un noyau permettant de manipuler des subdivisions nD à l’aide de n-cartes, puis par intégrer progressivement des opérations de manipulation et de calcul d’invariants topologiques.
 [b
[b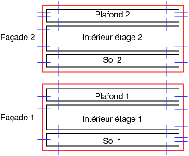 [c
[c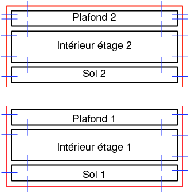 [d
[d